¿Que cambia si H(s) = 1∕(s + 2) ? (Responder sin realizar cálculos)
Solución:
Para empezar se debe asegurar la
estabilidad en lazo cerrado. Para eso se utiliza el criterio de
Routh-Hurwitz, aplicado a la ecuación característica del sistema:
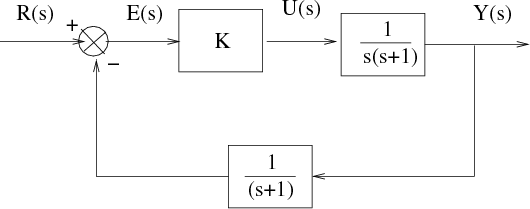
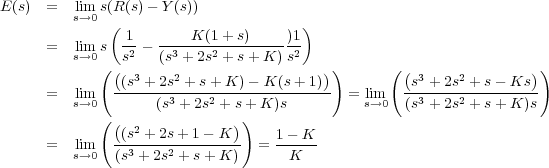
Obtener el valor de la salida en estacionario para el sistema de la figura, en función de la ganancia proporcional K , si se aplica la señal r(t) = 1 + t.
¿Que cambia si H(s) = 1∕(s + 2) ? (Responder sin realizar cálculos)
Solución:

Todos los coeficientes deben ser positivos y por tanto, K > 0. Por otro lado, la tabla de Routh-Hurwitz es

Todos los elementos de la primera columna deben de ser positivos y por tanto, el rango 0 < K < 2 define los límites de estabilidad. Dentro de este rango, se puede aplicar la propiedad de linealidad para la entrada considerada. Así es suficiente calcular el error estacionario ante entrada escalón y rampa, y para conocer la salida en estacionario sumarlo.
Para empezar, al ser la realimentación de ganancia unitaria (H(0)=1) y el sistema de tipo uno, el error en el permanente ante entrada escalón es nulo. Para la entrada rampa se puede utilizar la constante de error kv o directamente la expresión siguiente
Por tanto, y∞ = r∞- e∞ = 1 + t - .
.
Si se cambia la función de transferencia en la realimentación a
H(s) =  ,
su ganancia dejará de ser unitaria. De esta forma, la señal de error en
el permanente se mantiene nula, pero el error (r∞- y∞) no, ya que, siendo la señal de error
r∞
- 2y∞
finita, el error r∞ - y∞ no lo
será, puesto que la entrada tiene un señal rampa que tiende a
infinito.
,
su ganancia dejará de ser unitaria. De esta forma, la señal de error en
el permanente se mantiene nula, pero el error (r∞- y∞) no, ya que, siendo la señal de error
r∞
- 2y∞
finita, el error r∞ - y∞ no lo
será, puesto que la entrada tiene un señal rampa que tiende a
infinito.