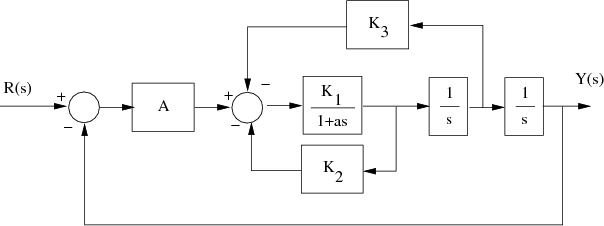
Obtener la función de transferencia del sistema de la Figura, y calcular los valores del parámetro A para los cuales el sistema es estable.
Solución
Vamos a ir reduciendo el diagrama de
bloques del sistema para obtener la fiunción de transferencia  del mismo. En un primer paso podemos
reducir el lazo cerrado formado por los bloques
del mismo. En un primer paso podemos
reducir el lazo cerrado formado por los bloques  y K2 de tal
modo que:
y K2 de tal
modo que:
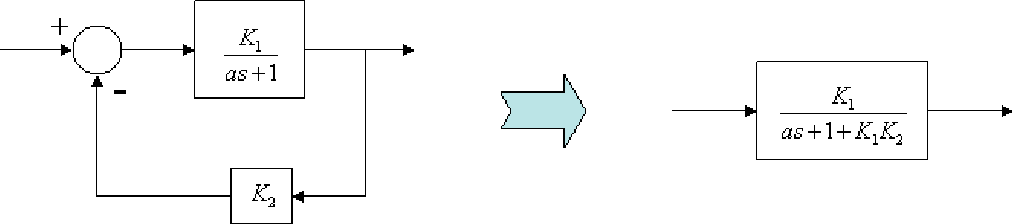
Este bloque queda en cascada con uno de los bloques  , por lo que dichos bloques pueden ser
reducidos a uno solo de función de transferencia
, por lo que dichos bloques pueden ser
reducidos a uno solo de función de transferencia  . Después de estas
operaciones el diagrama de bloques del sistema es:
. Después de estas
operaciones el diagrama de bloques del sistema es:
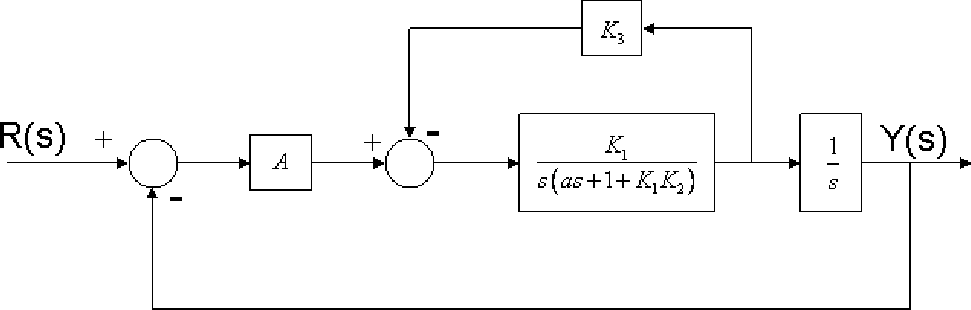
El lazo cerrado formado por los bloques  y K3 puede
ser sustituido por un bloque de función de transferencia
y K3 puede
ser sustituido por un bloque de función de transferencia  en la
cadena directa, siguiendo el mismo procedimento que el comentado en el
primer paso. Este bloque está en cascada con lo bloques A y
en la
cadena directa, siguiendo el mismo procedimento que el comentado en el
primer paso. Este bloque está en cascada con lo bloques A y  , por lo que pueden ser sustituidos los tres
bloques por uno solo de función de transferencia
, por lo que pueden ser sustituidos los tres
bloques por uno solo de función de transferencia  . De
esta forma se obtiene el diagrama de bloques de un sistema en lazo
cerrado con realimentación unitaria, mostrado en la siguiente
figura:
. De
esta forma se obtiene el diagrama de bloques de un sistema en lazo
cerrado con realimentación unitaria, mostrado en la siguiente
figura:

A partir de este esquema se obtiene la función de transferencia del sistema completo, resultando:

A continuación estudiamos
la estabilidad del sistema respecto del parámetro A. Para ello, aplicamos el criterio de
Routh-Hurwitz al polinomio denominador de la función de transferencia,
es decir, a D(s) = as3 +  s2 + K1K3s + AK1. La tabla de Routh de dicho polinomio
es:
s2 + K1K3s + AK1. La tabla de Routh de dicho polinomio
es:
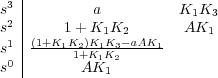
Observando las expresiones de la primera columna a la derecha de la línea en dicha tabla, se obtienen las siguientes condiciones necesarias y suficientes para la estabilidad del sistema.

Notad que en la tercera de las condiciones no se simplifica la ganancia K1 ya que dicha simplificación lleva consigo un cambio del operador relacional < por > si la ganancia K1 es negativa. Se pueden dar dos casos:
 . Notad que K3 ha de
ser positivo en este caso para que existan valores de A que garanticen la estabilidad del
sistema.
. Notad que K3 ha de
ser positivo en este caso para que existan valores de A que garanticen la estabilidad del
sistema. < A
< 0. Notad que K3 ha de
ser negativo en este caso para que existan valores de A que garanticen la estabilidad del
sistema.
< A
< 0. Notad que K3 ha de
ser negativo en este caso para que existan valores de A que garanticen la estabilidad del
sistema.Notad que el caso K1 = 0 no tiene sentido ya que en tal situación se anula uno de los bloques de la cadena directa del sistema y la salida del mismo es nula para cualquier entrada que se le aplique al sistema.