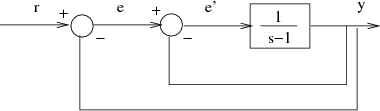
Considerando el siguiente sistema:
Solución:
Tomando como señal de error la señal e, la realimentación es unitaria, y las funciones de transferencia en lazo abierto y cerrado son

Al ser el sistema estable en lazo cerrado es aplicable el uso de los coeficientes estáticos del error para calcular los errores en el permanente. Y al ser la realimentación unitaria, el error y la señal de error son iguales. Por tanto, como el sistema en lazo abierto es de tipo 1, el error en estacionario ante entrada escalón es nulo, ante entrada rampa finito y ante entrada parabólica infinito. En el caso de la entrada rampa, el error se puede calcular mediate Kv:

En el segundo caso, con e’ como señal de error, la función de transferencia en lazo abierto es
y, no siendo de tipo 1, parece que se obtendrán conclusiones contradictorias frente a las anteriores.
Para entender correctamente el problema hay que darse cuenta que en ambos casos se está hablando y utilizando la señal de error para hacer los cálculos. Y se trata de dos señales diferentes: en el primero, es la señal e, y en el segundo e´. Y por tanto ante la misma entrada r tendrán valores diferentes. Y por supuesto, la señal de salida será la misma en mabos casos mientras la entrada no sea diferente.
Para resolver el problema planteado hay que darse cuenta que no se pide el valor de la señal de error en el permanente, sino el error en el permanente. Por tanto, es conveniente utilizar directamente su definición:

Como es lógico, la función de transferencia en lazo cerrado es la misma en los dos casos (Gcerrado = G′cerrado) y se obtiene la misma solución ya obtenida.