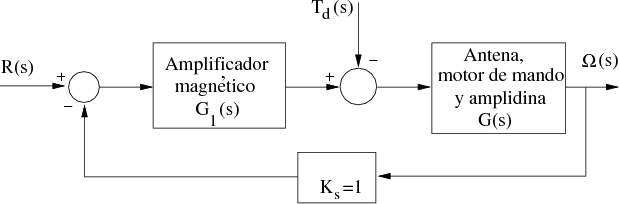
Considérese el sistema de control de velocidad de la figura siguiente, compuesto de una antena parabólica direccionable mediante la acción de un amplificador magnético que genera la señal de control que actúa sobre la antena.
Como se puede observar en la figura, se trata de un problema de seguimiento, dado que la variable que se pretende controlar es la velocidad de giro de la antena (en lugar de la posición de la misma).
La acción que realiza el viento sobre la antena se considera como una perturbación (Td(t)) que actúa sobre la señal de control y el resto de bloques se pueden aproximar por:

Solución:

Por otro lado, la función de transferencia que relaciona la velocidad de giro de la antena con la señal de referencia R(s) es:

Antes de
proceder al cálculo del valor de la ganancia Ka del
amplificador que garantiza el comportamiento en el permanente que se
pide, estudiemos el rango de valores de dicha ganancia para el cual el
sistema es estable. Para ello aplicamos el criterio de Routh-Hurwitz al
polinomio característico del sistema, esto es al polinomio D(s)=s3+13s2+140s+50 . La tabla de Routh correspondiente es
:
. La tabla de Routh correspondiente es
:
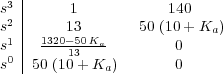
La condición necesaria y suficiente para que el sistema sea estable es:

Para este rango de valores de Ka tiene sentido el estudio del régimen permanente.
El error del sistema, Er(s)=R(s)-Ω(s), que en este caso coincide con la señal de error al ser la realimentación unitaria, depende tanto de la señal de referencia como de la señal de perturbación. Es decir,
![[Er (s)] [Er(s)] 1 G(s) Er(s) = -R(s) R (s)+ T-(s) Td(s) = 1-+-G-(s)G(s) R (s)+ 1+-G-(s)G-(s)Td(s) Td(s)=0 d R(s)=0 1 1](/file.php/83/problemas/antena_html/antena7x.png)
donde ![[Er(s)] -R(s)](/file.php/83/problemas/antena_html/antena8x.png) Td(s)=0 denota la función de transferencia que
relaciona el error con la señal de referencia cuando la perturbación es
nula y
Td(s)=0 denota la función de transferencia que
relaciona el error con la señal de referencia cuando la perturbación es
nula y ![[ ] Er(s) Td(s)](/file.php/83/problemas/antena_html/antena9x.png) R(s)=0 la función
de transferencia que relaciona el error con la señal de perturbación
cuando la referencia es nula. Haciendo cálculos se obtiene:
R(s)=0 la función
de transferencia que relaciona el error con la señal de perturbación
cuando la referencia es nula. Haciendo cálculos se obtiene:

El error en régimen estacionario ante una entrada r(t)=9,55 rpm=1 rad/seg y una perturbación Td(t)=0,2 V es:


Esta expresión para el
error es válida para valores de Ka que
hacen que la función Er(s) sea analítica en el semiplano derecho del plano
complejo y, por tanto, sea aplicable el teorema del valor final de la
transformada de Laplace, es decir, limt→∞er(t) = lims→0sEr(s) . Dicho rango de
valores de Ka es el mismo para el cual el sistema es
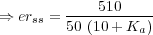
estable, es decir, -10 < Ka < 26,4. De la expresión para el error, erss
=  , se deduce que cuanto mayor sea la
ganancia Ka del amplificador mejor es la precisión
del sistema de seguimiento. En este sentido, el mínimo error de
seguimiento que se puede obtener para las entradas de referencia y
perturbación consideradas es erss=0,28 rad/seg=2,67
rpm, cuando el valor de la ganancia del amplificador está ajustado a
Ka=26,4. Para que el
error fuera inferior a 0,083 rpm, como demanda el enunciado del problema,
haría falta un valor de Ka para el cual el sistema no es estable.
Por tanto, no existe un valor para la ganancia Ka que
haga el error inferior a 0,083 rpm para dichas entradas de referencia y
perturbación.
, se deduce que cuanto mayor sea la
ganancia Ka del amplificador mejor es la precisión
del sistema de seguimiento. En este sentido, el mínimo error de
seguimiento que se puede obtener para las entradas de referencia y
perturbación consideradas es erss=0,28 rad/seg=2,67
rpm, cuando el valor de la ganancia del amplificador está ajustado a
Ka=26,4. Para que el
error fuera inferior a 0,083 rpm, como demanda el enunciado del problema,
haría falta un valor de Ka para el cual el sistema no es estable.
Por tanto, no existe un valor para la ganancia Ka que
haga el error inferior a 0,083 rpm para dichas entradas de referencia y
perturbación.


Aplicando el teorema del valor final de la transformada de Laplace y considerando las mismas señales de entrada y perturbación que en el apartado (i) se obtiene:



Considerando el valor Ka=26.4, para el cual se obtiene la mejor precisión del sistema en lazo cerrado, el error del sistema en lazo abierto es erss=-1,62 rad/seg. Esto quiere decir que si la señal de referencia es de r(t)=1 rad/seg la salida en el permanente es ω(t)=2,62 rad/seg. Es decir, la antena se mueve a una velocidad que es un 162% más rápida que la velocidad de referencia.
iii. Considerando el valor de la ganancia del amplificador para el cual se obtiene la máxima precisión en lazo cerrado, es decir Ka=26.4, ante una entrada de referencia r(t)=1 rad/seg el sistema en lazo cerrado hace girar a la antena con un velocidad en el permanente de ω(t)=0,72 rad/seg mientras que el sistema en lazo abierto la haría girar con una velocidad angular de ω(t)=2,62 rad/seg. Esta mejoria en el comportamiento del permanente en el sistema en lazo cerrado con respecto al comportamiento del lazo abierto es debido al efecto del lazo de realimentación que disminuye el efecto de la señal de perturbación con una elección adecuada de la ganancia del amplificador. En este contexto, dicho amplificador se puede usar como un elemento de control para atenuar los efectos de la perturbación sobre la salida del sistema.
Observación final
Las resoluciones de todos los ejercicios de esta asignatura están pensadas que sean "sobre el papel", esto es, sin ayuda informática. Sin embargo, como se presenta el programa Scilab como ayuda para el estudio conviene hacer un comentario a la solución presentada de este ejercicio.
En principio cabe pensar que la resolución ha sido correcta y que el mejor valor del parámetro Ka con vistas a mejorar la precisión del sistema es 26.4, que corresponde al valor mayor dentro del rango que hace que el comportamiento en lazo cerrado sea estable. Vamos a utilizar el programa Scilab para obtener la señal de salida del sistema (velocidad de seguimiento de la antena):
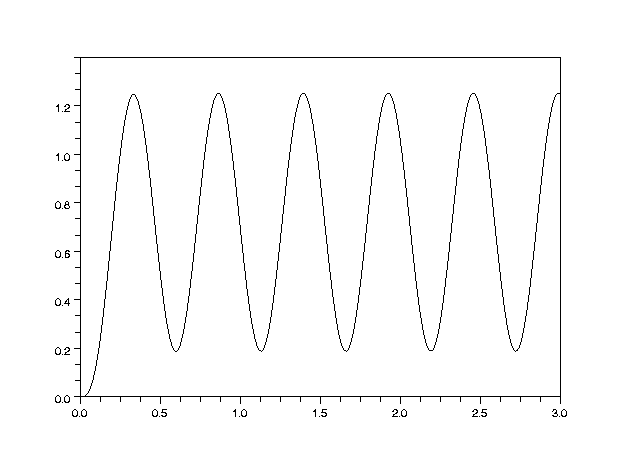
Como se puede observar, la velocidad de seguimiento es oscilatoria. Y aunque la media de la oscilación corresponde al valor de error mínimo calculado, se puede decir que el control no es muy bueno. ¿Qué está pasando?, ¿finalmente no es buena la elección del parámetro Ka?.
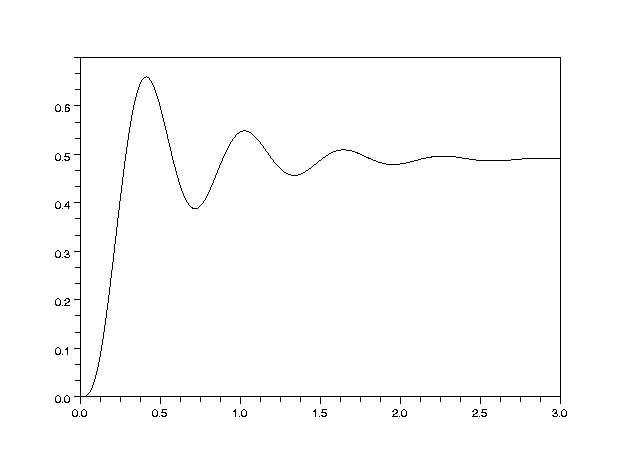
La razón de esta contradicción hay que buscarla en la elección del parámetro. Efectivamente, el comportamiento del sistema para un valor de Ka cercano a la estabilidad crítica, es apreciablemente oscilatorio. Por lo tanto, aunque matemáticamente es la mejor elección en cuanto a precisión, no es así en cuanto a comportamiento general del sistema realimentado, y habría que buscar un compromiso entre precisión y comportamiento. Por ejemplo, en la siguiente figura se muestra la salida del sistema con una elección de Ka=10. Y aunque el error es superior (erss=0,51 rad/seg=4,87 rpm) al anterior, el resultado final podría considerarse mejor.