Solución:
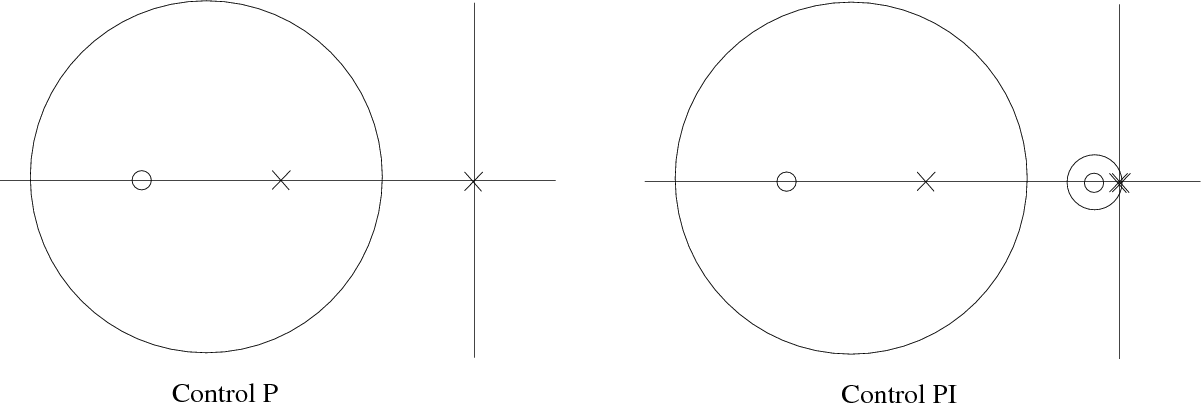
En el caso del controlador P, el sistema es siempre estable, siendo el error ante entrada rampa menor según se aumenta la ganancia, ya que el sistema es de tipo 1 (esto también supone aumentar la señal de control haciendo el sistema más rápido). Si la señal de entrada fuese una señal parabólica (o de orden superior) el error sería infinito.
En el caso del controlador PI, se obtiene directamente un error nulo en estacionario ante entrada rampa y finito ante entrada parabólica (error que es más pequeño si se aumenta la ganancia proporcional). Por otro lado, la estabilidad también se mantiene para cualquier valor de la ganancia proporcional. Comparando los lugares de las raíces, se observa que el comportamiento dinámico es similar, si la constante integral no cambia demasiado, es decir, si la posición del cero es cercana al origen no cambia demasiado).