|
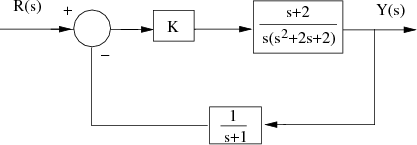
Se desea conocer las trayectorias descritas por los polos del sistema en lazo cerrado de la Figura 9.5 cuando el valor de la ganancia K del control proporcional varía de 0 a ∞. Además, a partir de dicho resultado se analizará la dinámica del sistema según sea el valor de dicha ganancia.
Observando el diagrama de bloques, la función de transferencia del lazo abierto del sistema es:
Asimismo, para el posterior análisis de la dinámica del sistema es necesario calcular la función de transferencia en lazo cerrado, siendo ésta:
Se puede observar que en lazo cerrado aparecen dos ceros (el de la cadena directa y el polo de la realimentación) cuyos efectos en la dinámica habrá que tener en cuenta.
En primer lugar para construir el Lugar de las Raíces habrá que marcar en el plano s la situación de los polos (aspas) y ceros (círculos) de la función de transferencia F(s) = G(s)H(s) (9.10). A continuación, se aplican las reglas de construcción vistas en el apartado 9.3.1. Notad que esquemas de control diferentes del mostrado en la Figura 9.5 pero con la misma F(s) tendrán el mismo Lugar de las Raíces que éste ya que el Lugar de las Raíces se construye a partir de la función de transferencia F(s).

Una de dichas ramas finalizará en el cero de F(s) (que es polo de la función de transferencia en lazo cerrado cuando K tiende a ∞):

Las otras tres ramas (exceso polo-cero) irán al infinito siguiendo 3 asíntotas que se calcularán en la regla nº 4.
![⋃ (- ∞,- 2] [- 1,0]](/file.php/83/cap9_html/cap935x.png)

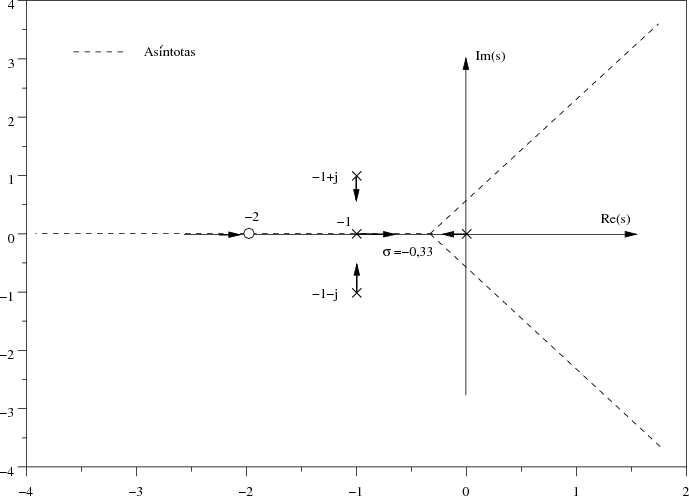
Las 3 asíntotas se cortan en el eje real a una distancia σ del origen (9.8):

A dicho punto se le denomina centroide.
![[- 1,0]](/file.php/83/cap9_html/cap938x.png) pertenece al Lugar de las Raíces, la rama
saldrá del origen con ángulo φ = 180∘ = π rad .
pertenece al Lugar de las Raíces, la rama
saldrá del origen con ángulo φ = 180∘ = π rad .![(- ∞,- 2]](/file.php/83/cap9_html/cap939x.png) , el ángulo de llegada será φ = 180∘ = π rad .
, el ángulo de llegada será φ = 180∘ = π rad .Considerando un punto auxiliar s0 perteneciente al Lugar de las Raíces e infinitamente próximo al polo s = -1 + j (Figura 9.6) y aplicando el principio del argumento ( 9.9) se obtiene:

A partir de dicha expresión, se deduce que el ángulo
de salida de la rama que parte de dicho polo es φ = - .
.
 .
.En la Figura 9.7 se puede observar la construcción del Lugar de las Raíces con las reglas aplicadas hasta este momento.
|
![(- ∞, - 2]](/file.php/83/cap9_html/cap945x.png) y otro en
y otro en ![[- 1,0]](/file.php/83/cap9_html/cap946x.png) . Por un lado, en algún punto del primer
intervalo confluirán las dos ramas que finalizan en los puntos s = -2 y s = -∞, y por el otro, en algún punto del segundo
intervalo las dos ramas que parten de los puntos s = 0 y s = -1 tendrán que
dispersarse.
. Por un lado, en algún punto del primer
intervalo confluirán las dos ramas que finalizan en los puntos s = -2 y s = -∞, y por el otro, en algún punto del segundo
intervalo las dos ramas que parten de los puntos s = 0 y s = -1 tendrán que
dispersarse.

A continuación, se comprueba la pertenencia o no de estos puntos al Lugar de las Raíces. Para ello se aplica la condición del argumento de la ecuación característica de sistema en cada uno de dichos puntos. Aquellos puntos que satisfacen dicha condición pertenecen a Lugar de las Raíces y, por tanto, son puntos de confluencia o dispersión. Por último, el valor de la ganancia propocional K para el cual se alcanza un punto de confluencia o dispersión se obtiene aplicando la condición del módulo de la ecuación característica del sistema en dicho punto. De este modo se deduce que:

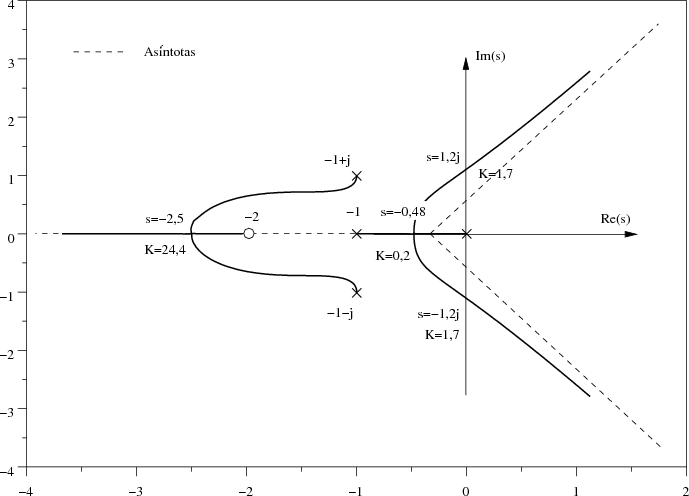
es decir, por un lado, cuando K = 0.2, el polo que sigue la rama que parte del punto s = 0 y el que sigue aquella que parte de s = -1, se encuentran en el punto s = -0.48. Por otro lado, cuando K = 24.4 el polo del sistema que sigue la rama que finaliza en s = -2 y aquel que sigue la rama que finaliza en s = -∞ se encuentran en s = -2.5. Por tanto, s = -0.48 y s = -2.5 son puntos de dispersión o confluencia de ramas del Lugar de las Raíces del sistema.

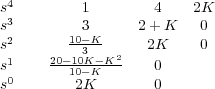
Aplicando la regla de Routh-Hurwitz al polinomio característico se obtiene la tabla de Routh:
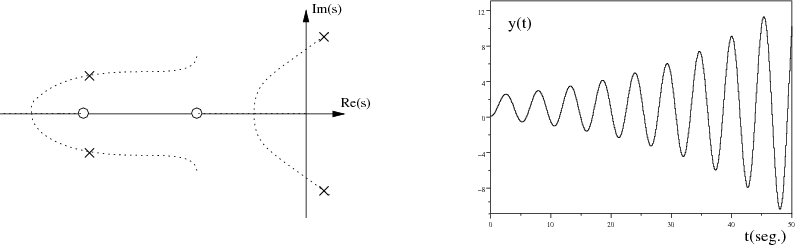
Analizando la primera columna se tiene que el rango de estabilidad de la ganancia proporcional K queda fijado en:

Utilizando los valores límite de la ganancia K y las ecuaciones auxiliares que con ellos se obtienen de la tabla de Routh-Hurwitz, se calculan los puntos de corte de las ramas del Lugar de las Raíces con el eje imaginario. De este modo, se deduce que:

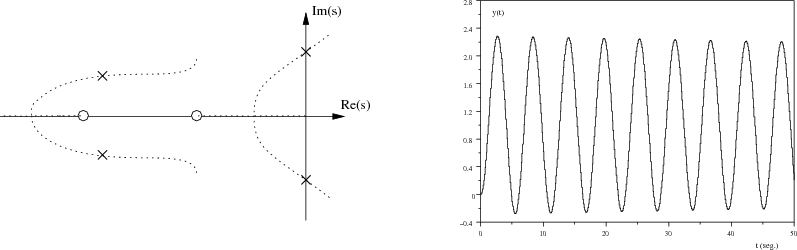
es decir, existen tres puntos de corte con el eje imaginario. Uno de ellos es el punto s = 0 que corresponde al valor K = 0 y es, por tanto, el punto de arranque de una de las ramas del Lugar de las Raíces. Los otros dos puntos, s = ±1.2j, son polos del sistema cuando la ganancia K = 1.7. En este caso, el sistema es críticamente estable ya que hay dos polos en el eje imaginario y otros dos polos estables como se puede deducir de la tabla de Routh 9.12 evaluada cuando K = 1.7. Notad que los coeficientes de la primera columna de dicha tabla son todos positivos excepto el coeficiente de la fila correspondiente a s1, el cual es nulo.
En definitiva, una vez aplicado el método de construcción del Lugar de las Raíces al ejemplo considerado, se obtiene la representación gráfica del mismo mostrada en la Figura 9.8.
|
A partir de dicha representación, se puede hacer el análisis de la dinámica del sistema según varíe el valor de la ganancia K del controlador proporcional. Primeramente, es necesario recordar la función de transferencia en lazo cerrado del sistema (9.11) que se estudia:

Analizando tanto la función de transferencia en lazo cerrado como el Lugar de las Raíces de la Figura 9.8 se llegan a las siguientes conclusiones:

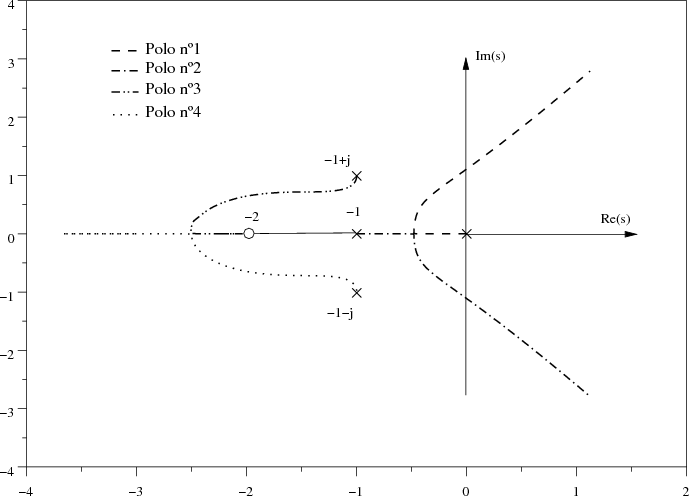
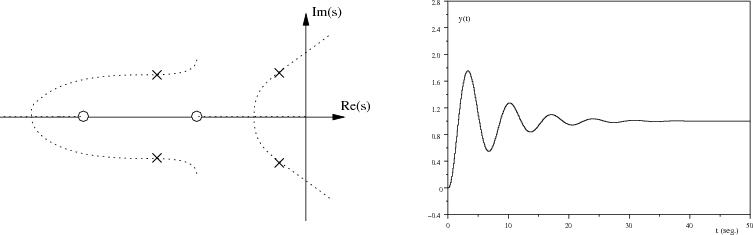
Para analizar más en profundidad el comportamiento del sistema según sea el valor de la ganancia proporcional será necesario estudiar la configuración de polos y ceros en lazo cerrado para varios intervalos de la ganancia proporcional K. Para simplificar la explicación se van a enumerar los polos en lazo cerrado según sea la rama por la que evolucionen, como se puede ver en la Figura 9.9.
|
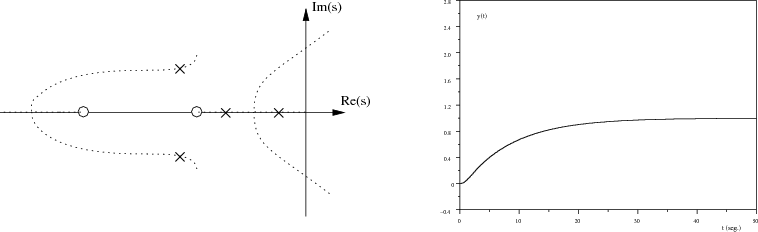
0 < K ≤ 0.2: Los polos 1 y 2 son reales, siendo dominante el nº 1. Los otros dos polos estarán en algún punto cercano de los puntos de partida de sus correspondientes ramas (Figura 9.10). Los dos ceros son fijos y situados en s = -1 y s = -2. Además, si el valor de K es muy pequeño el polo real 2 estará lo suficientemente cercano al cero s = -1 como para compensar sus efectos contrarios en la dinámica del sistema. En dicho caso el sistema presenta un polo real dominante y muy cercano al origen, pudiéndose despreciar la influencia del resto de polos y ceros en la dinámica del sistema. Es decir, la respuesta del sistema ante entrada escalón sería muy lenta y sin prácticamente oscilaciones (Figura 9.10 ).
|
|
|
 (9.10)
(9.10) (9.11)
(9.11)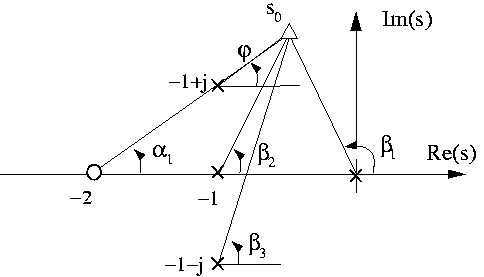
 (9.12)
(9.12)