
Se estudia la parte de la respuesta de un sistema una vez finalizado el régimen transitorio. Dicha parte se conoce como régimen permanente o estacionario. Se definen una serie de coeficientes que permiten caracterizar dicho régimen.
Como se ha estudiado anteriormente las características del régimen transitorio de la respuesta de un sistema lineal ante una entrada determinada son esenciales en el funcionamiento de los sistemas automáticos de control. Sin embargo ya se ha señalado también la extraordinaria importancia que tiene el comportamiento del sistema en régimen permanente.
En el diseño de sistemas automáticos de control es necesario tener presente que el objetivo es controlar una o varias variables de salida, y que la diferencia entre el valor real y el valor deseado para cada una de las variables de salida del sistema de control ha de ser la menor posible. El ideal sería la igualdad entre ambos valores, sin embargo, debido a razones teóricas o prácticas, cuando se alcanza el régimen estacionario existe una desviación entre las variables de salida reales y las deseadas correspondientes.
Por todo ello, se liga la precisión de un sistema a su capacidad de autoeliminar dicha desviación, o con más generalidad, a su capacidad autónoma de mantener el error correspondiente a cada variable de salida entre valores suficientemente pequeños una vez alcanzado el régimen estacionario.
Para el análisis práctico de la precisión de un sistema, se estudia su error estacionario al ser excitado por las señales de prueba: escalón, rampa y parábola unitarias.
Por último, conviene advertir que es una buena costumbre del diseñador de sistemas de control el comprobar, como primer paso, la estabilidad absoluta del sistema de control que se quiera diseñar, dado que, como se recordará repetidas veces a lo largo del capítulo, todos los cálculos realizados para obtener el error estacionario del sistema son obtenidos con la consideración de que el sistema es estable, o más exactamente, tiene todos sus polos en el semiplano izquierdo.
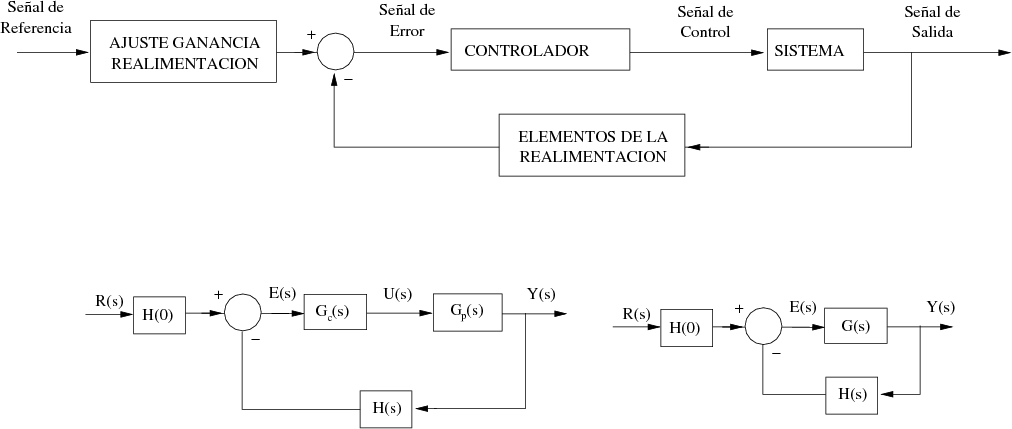
Si se agrupan todos los elementos que pueda haber en la cadena directa (controlador, actuador, planta, etc.) de un sistema realimentado como el de la Figura 8.1 en el bloque de función de transferencia G(s), la función de transferencia en lazo cerrado de dicho esquema de control es:
Se define la señal de error E(s) como la diferencia entre la señal de referencia R(s) y la de salida Y(s) multiplicada por la función de transferencia de la realimentación H(s), es decir:
de donde se obtiene:
Utilizando el teorema del valor final se obtiene la señal de error en régimen estacionario1:
Asimismo, utilizando la expresión (8.2) se tiene:
Esta expresión permite obtener la señal de error en el permanente sin más que calcular dicho límite para la señal de referencia deseada. Mediante dicha expresión, en la sección siguiente se van a definir una serie de coeficientes de mérito (cuanto más altos sean, menor es la señal de error en el régimen estacionario), que permitirán de forma sencilla conocer la precisión del sistema de control en lazo cerrado.
A la hora de referirse a la precisión del sistema en lazo cerrado existe una confusión terminológica debida a la utilización en la bibliografía de conceptos diferentes con el mismo término. El término de error hace referencia a la precisión del sistema y se puede intuitivamente entender que corresponde a la diferencia entre el valor deseado para la señal de salida del sistema en lazo cerrado o referencia y el valor que realmente tenga. Sin embargo, como se ha visto anteriormente (8.2), no se ha utilizado de esta forma el término señal de error. Así, se va a definir como error (para diferenciar de señal de error) a la diferencia entre las señales de referencia y de salida:

Siguiendo el mismo procedimiento anterior, se puede obtener la expresión del error en el permanente:
Estudiando las dos expresiones (8.3) y (8.5) que permiten calcular la señal de error y el error en el permanente se puede observar que coinciden únicamente si:

esto es, si la ganancia a bajas frecuencias de la función de transferencia de la realimentación (generalmente el captador o sensor de la señal de salida) es unitaria.
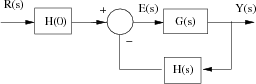
El hecho de que estas dos señales sean diferentes (mientras la ganancia de la realimentación no sea unitaria) hace que se den algunas aparentes contradicciones, como puede ser que aún siendo nula la señal de error en el permanente (ess) no lo sea el error (erss), esto es, la señal de salida y la de referencia no sean iguales en el permanente. Este problema se puede solucionar sin más que introducir un precompensador en la cadena directa cuya ganancia sea igual a la ganancia del realimentación (H(0)), como puede verse en la Figura 8.2.
En adelante se va a estudiar la forma de calcular la señal de error y, por lo tanto, a no ser que H(0) sea unitaria, serán diferentes los valores en el permanente de la señal de error E(s) y la diferencia entre las señales de referencia R(s) y salida Y(s).
Partiendo de la expresión de la señal de error (8.4) se puede calcular la señal de error en el permanente del sistema ante cualquier entrada sin más que sustituir la transformada de Laplace de la referencia R(s) en dicha expresión.
Se definen unos coeficientes de mérito que evaluan la precisión de los sistemas utilizando la señal de error (8.2) ante las tres entradas de referencia R(s) tipo, es decir, entrada escalón, rampa y parábola unitarias. Los valores de dichos coeficientes sólo son válidos cuando los polos de la función de transferencia en lazo cerrado, o raíces de la ecuación característica 1+G(s)H(s), estén situados en el semiplano izquierdo, o de forma simplificada, cuando el sistema en lazo cerrado sea estable.
Así, ante entrada
escalón unitario (R(s)= ), rampa
unitaria (R(s)=
), rampa
unitaria (R(s)= ) y
parábola unitaria (R(s)=
) y
parábola unitaria (R(s)= ), a
partir de la expresión (8.4), las señales de error
en el permanente se pueden expresar, respectivamente, de la forma:
), a
partir de la expresión (8.4), las señales de error
en el permanente se pueden expresar, respectivamente, de la forma:
siendo los coeficientes Kp, Kv y Ka los llamados coeficientes estáticos de error de posición, velocidad y aceleración, respectivamente, que se obtienen mediante las expresiones:
que, como se ha dicho anteriormente, son coeficientes de mérito, esto es, cuanto mayor sean, en valor absoluto, menores serán en el permanente las señales de error generadas por las diferentes entradas tipo.
El valor de las constantes de error de un sistema dado depende de la función de transferencia en cadena abierta (o lazo abierto) G(s)H(s). Dicha función de transferencia se puede escribir como:

donde K es la ganancia a bajas frecuencias de la función de transferencia en lazo abierto, es decir, K=G(0)H(0).
En las expresiones (8.7) puede verse que las constantes de error del
sistema están determinadas por el comportamiento de G(s)H(s) cuando s→0. Ya que G(s)H(s) tiende a  cuando
s→0, se puede hacer una clasificación de los
sistemas en función del valor de j, es decir, en función del
número de polos en el origen que presenta la función de transferencia
del lazo abierto del sistema. Así, existen sistemas de tipo 0 (j=0), tipo 1 (j=1), tipo 2 (j=2), etc. Teniendo en cuenta esta clasificación
de los sistemas y las expresiones (8.6
) y (8.7
) se puede construir la Tabla (8.1), en la que se muestra que la señal de error en el
permanente puede ser nula, distinta de cero (pero finita) o infinita
según sea el valor de j, o tipo del sistema, y la entrada tipo
aplicada al sistema.
cuando
s→0, se puede hacer una clasificación de los
sistemas en función del valor de j, es decir, en función del
número de polos en el origen que presenta la función de transferencia
del lazo abierto del sistema. Así, existen sistemas de tipo 0 (j=0), tipo 1 (j=1), tipo 2 (j=2), etc. Teniendo en cuenta esta clasificación
de los sistemas y las expresiones (8.6
) y (8.7
) se puede construir la Tabla (8.1), en la que se muestra que la señal de error en el
permanente puede ser nula, distinta de cero (pero finita) o infinita
según sea el valor de j, o tipo del sistema, y la entrada tipo
aplicada al sistema.
|
De la Tabla (8.1) se deduce que la respuesta de un sistema de control ante una entrada escalón, produce una señal de error estacionaria finita si no hay integración en la función de transferencia en lazo abierto (j=0), y dicha señal de error será tanto más pequeña cuanto mayor sea K. Sin embargo, un aumento de la ganancia K empeora, en general, la estabilidad relativa del sistema en lazo cerrado, pudiendo llegar a ser inestable cuando la ganancia K supera un determinado valor crítico. En consecuencia, si se desea una señal de error estacionaria nula para una entrada escalón, el sistema ha de ser de tipo 1 ó mayor, con la condición, por supuesto, de que el sistema siga siendo estable en lazo cerrado.
Asimismo, de dicha tabla se deduce que, ante una señal de referencia rampa, la señal de error en el permanente de un sistema de tipo 0 es infinita, finita para un sistema de tipo 1, y nula para uno de tipo 2 o superior. Por último, para una entrada parábola se tiene que la señal de error estacionaria es infinita para sistemas de tipo 0 y 1, finita para sistemas de tipo 2, y finalmente, nula para los de tipo 2 o superior.
Obsérvese que los valores finitos que aparecen en la Tabla 8.1 están referidos a las entradas tipo unitarias. En caso de que las entradas al sistema no sean las unitarias dichos valores finitos han de ser multiplicados por la magnitud de la señal de entrada, como se puede deducir a partir de la expresiones (8.4) y (8.7).
Se ha de notar que para disminuir la señal de error en régimen estacionario se puede aumentar el tipo de sistema agregando integradores en la cadena directa, lo que se consigue con una acción de control integral. Sin embargo, como se verá en capítulos posteriores, ésto trae consigo problemas de estabilidad del sistema. Por último, si se trata de un sistema con realimentación unitaria, o al menos con realimentación de ganancia unitaria a bajas frecuencias (H(0)=0), todas las consideraciones anteriores se pueden extender al error estacionario, esto es, al seguimiento en el régimen estacionario de la señal de referencia por parte de la de salida del sistema en lazo cerrado.
 (8.1)
(8.1) (8.2)
(8.2) (8.3)
(8.3) (8.4)
(8.4)
 (8.6)
(8.6) (8.7)
(8.7)

