Introducción al Control Automático
-
Se trata de un primer contacto con los sistemas
de control (Automática, Ingeniería de
Control o Regulación) con abundantes ejemplos prácticos. Se definen los conceptos que van a utilizarse a lo largo de la asignatura.
Finalmente, se da un breve repaso
histórico a la Teoría del Control.
1.1. Introducción al concepto de
control
Ir al Indice
La primera vez que se
estudia una asignatura de Automática o de Ingeniería de Control no se
sabe exactamente a qué se refiere cuando se habla de "sistema de
control", y realmente ni siquiera cuando se habla de "control". De
hecho, el concepto de control es muy utilizado en diferentes entornos
de nuestra vida. Se puede utilizar para referirse a circunstancias
puramente humanas (“tengo el control de la situación”), o a una
interacción hombre-máquina (conducción de un automóvil, que supone
"controlar" el vehículo si no se quiere tener un accidente), y
finalmente puede referirse únicamente a máquinas (control de la
temperatura de una sala, de la velocidad de giro de un motor, ...).
Se puede decir por
tanto que cualquier objeto susceptible de modificar su comportamiento o
alguna de sus características puede ser controlado, y por tanto ser
considerado como un sistema, y más concretamente un sistema de control,
o sistema controlado.
1.2. Sistemas de control en lazo
abierto
Ir al Indice
Se puede decir de
forma más estricta que un sistema automático de control no es más que
un conjunto de dispositivos que acoplados a un proceso, tratan de
conseguir que alguna magnitud del mismo varíe en el transcurso del
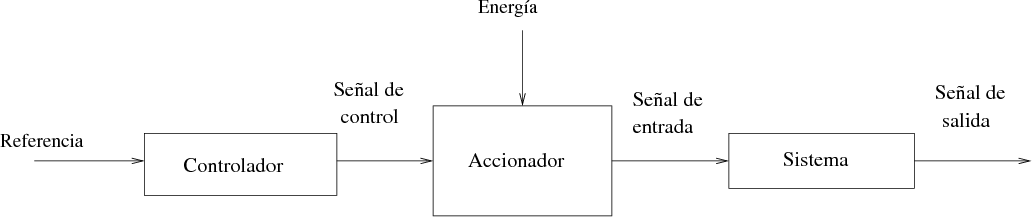
tiempo de alguna forma previamente definida. De acuerdo con esta
concepción, un sistema de control puede quedar representado en forma
esquemática por una caja que recibe una señal de entrada y transmite
una señal de salida (Figura 1.1
). La señal de entrada al
sistema es la conocida como señal de control, señal que es generada por
un dispositivo denominado controlador cuya función es la de suministar
al sistema la señal adecuada para conseguir que la de salida o variable
controlada varíe según las especificaciones de diseño. Un sistema que
actúe de esta forma recibe el nombre de sistema de control en lazo
abierto.
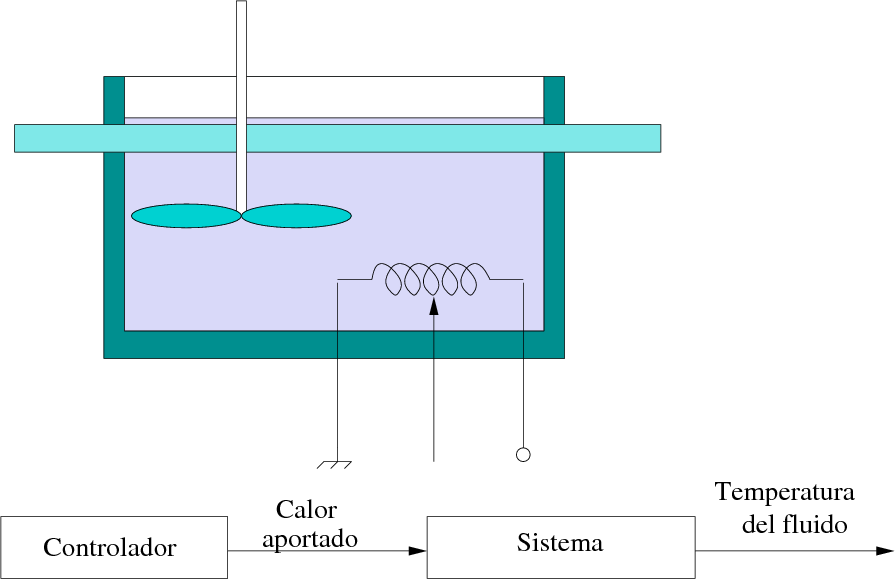
Veamos un ejemplo de un sistema de
estas características. Supongamos que deseamos controlar la temperatura
del fluido contenido en un tanque. Suponemos que esta temperatura es
uniforme gracias a la acción de un agitador y admitimos que las
pérdidas de calor en el tanque se deben únicamente a dos causas:
- Calor cedido al medio ambiente
- Calor cedido a un fluido que circula por una
tubería sumergida en el tanque.
Suponemos también que
podemos aportar calor al líquido del tanque mediante un reostato. La
Figura 1.2
lo muestra en forma esquemática.
Si se conocen todos
los parámetros que definen el sistema (volumen de fluido en el tanque,
calor específico, etc...) así como el caudal y temperatura del fluido
que recorre el interior de la tubería, está claro que podremos
determinar la cantidad de calor que sería necesario aportar al tanque
para mantener la temperatura del fluido en un valor predeterminado o
temperatura deseada (supuesta conocida la temperatura ambiente):
De la misma
forma sería posible calcular qué calor deberíamos aportar para que la
temperatura del fluido en el tanque variara con el tiempo de una forma
determinada. Por lo tanto aportando la cantidad de calor obtenida
mediante los cálculos el sistema quedará controlado. Este
es un ejemplo de un sistema de control en lazo abierto. Existe una
variable de control que es la cantidad de calor aportada por unidad de
tiempo y una salida controlada que es la temperatura del fluido
contenido en el tanque.
Es necesario destacar que
cualquier cambio en las variables del sistema (temperatura ambiente,
caudal o temperatura del líquido que circula por la tubería, ...)
supondría que el calor suministrado no es adecuado y la temperatura
final del fluido no sería la deseada. Lo que supone que sería necesario
rehacer todos los cálculos (rehacer el controlador) para obtener un
buen control de la temperatura. Es evidente que el sistema sería
incapaz de corregir sus propios errores. Esta es una característica
general de los sistemas en lazo abierto.
Otros ejemplos de
sistemas de control en lazo abierto en los que la acción de control
está prefijada son los casos de la tostadora de pan, lavadora
automática, etc.
1.3. Sistemas de control en lazo
cerrado
Ir al Indice
Vamos a ver que la
incapacidad de corrección de los errores propios del sistema puede ser
evitada con la utilización de los llamados sistemas de control en lazo
cerrado o realimentados.
Estos se caracterizan
por el hecho de que la variable a controlar (sea temperatura, presión o
velocidad) se mide mediante un sensor para poder compararla con el
valor que se considera adecuado. De esta forma se sabe si el control
está siendo adecuado, y si no, se actúa en consecuencia.
Una primera solución
al problema planteado en el ejemplo anterior sería que un operario mida
la temperatura del fluido con un termómetro y de acuerdo con las
lecturas que hiciera ajustase manualmente el reostato hasta conseguir
nuevamente la temperatura deseada. ¿Sigue siendo un control en lazo
abierto? Evidentemente hay algo fundamental que ha variado, y es que la
variable de control (calor entregado al tanque a través del reostato)
depende ahora del valor que tome la variable de salida (temperatura del
líquido). Esta es la característica fundamental de un sistema en lazo cerrado o realimentado: la variable de salida es
comparada con el valor deseado (o valor de referencia) y de acuerdo con
esa comparación se genera una señal de control para que la referencia y
la salida lleguen a tomar valores idénticos.
Ahora bien, el sistema
con el operador humano descrito no puede considerarse como sistema
automático de control, pues el término "automático" excluye
necesariamente la existencia de un operador en el sistema de control.
De todas formas la experiencia se ha encargado de demostrar que si bien
el operador no debe estar incluido en el control sí debe de estar por
lo menos cerca de él.
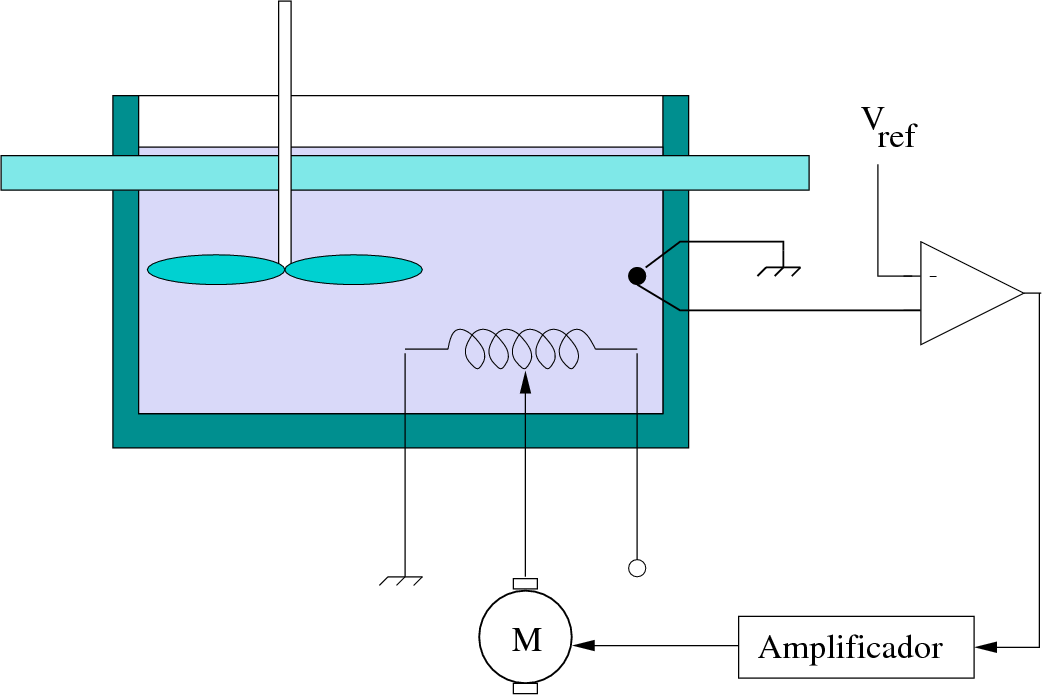
Para realizar de forma
automática el control de temperatura del fluido en el tanque podemos
disponer de un termopar el cual nos da una tensión que es proporcional
a la temperatura del líquido (Figura 1.3
). Esta tensión se compara con una
tensión de referencia asociada a la temperatura que se desea fijar. El
resultado de esta comparación será nulo, positivo o negativo, según el
fluido tenga la temperatura deseada, inferior o superior a ella. Este
resultado puede utilizarse, a través de los dispositivos adecuados,
bien para no variar la cantidad de calor suministrada si la comparación
ha sido nula o bien para aumentar o disminuir dicha cantidad si la
comparación ha sido positiva o negativa.
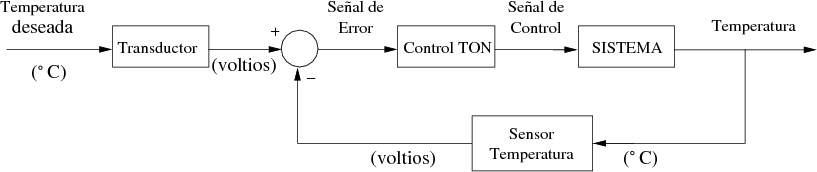
Un primer esquema de
control (Figura 1.4
) podría ser aquel en el
que el reostato se desconecte mientras la temperatura del líquido es
superior o igual a la deseada y cuando aquella descienda por debajo de
ésta se vuelve a conectar el calentador. Este tipo de control se
denomina control Si-No o Todo-Nada (TON).
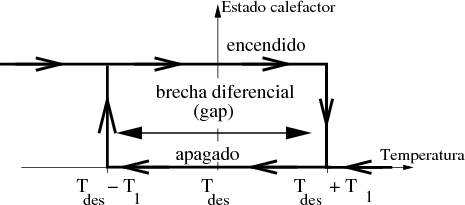
Este tipo de control
no se suele implementar tal como se ha descrito, sino que para evitar
unos excesivos encendidos y apagados del calefactor (que supondrían un
desgaste que daría resultado con el uso a roturas más que probables) el
encendido y apagado siguen la dinámica representada en la gráfica de la
Figura 1.5
.
Así, el calefactor no
se apaga hasta superar una temperatura superior a la deseada (Tdes
+ T1), y una vez apagado no se enciende hasta
que la temperatura sea inferior a una temperatura inferior a la deseada
(Tdes - T1). La
anchura del ciclo de histéresis de la gráfica se denomina brecha
diferencial o gap, y de su valor dependerá el número de encendidos y
apagados y la precisión del control.
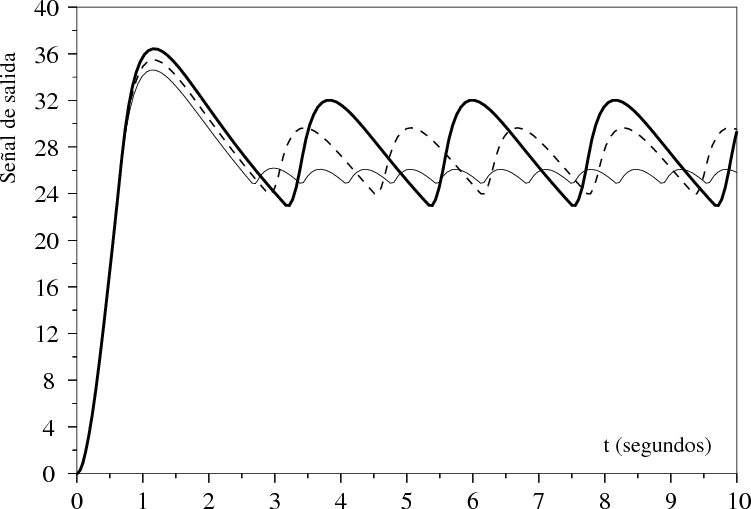
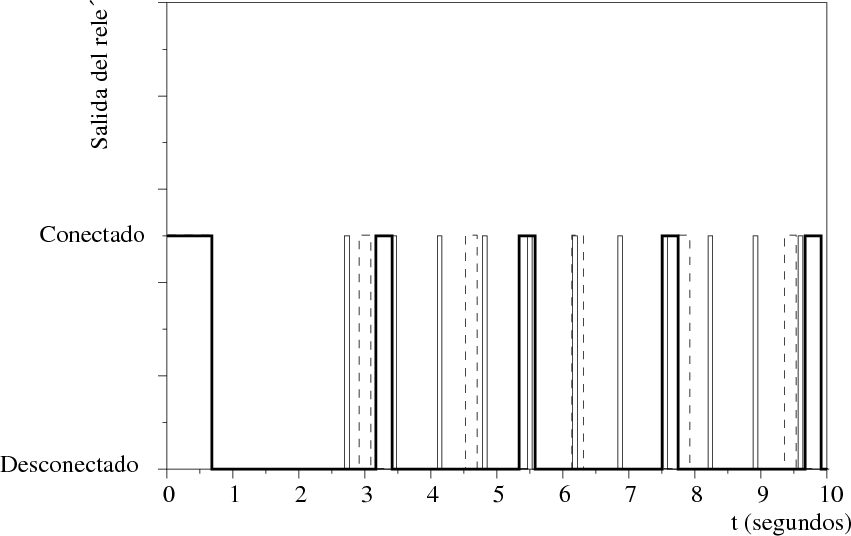
En la Figura 1.6
.a se muestra la
evolución temporal de la temperatura que alcanza el fluido para tres
valores de la brecha diferencial del control Si-No. Se observa que
cuanto menor sea ésta mayor es la precisión del control, pero sin
embargo, en contrapartida, el número de veces que se conecta y
desconecta el calentador es mayor con el consiguiente mayor desgaste de
los materiales.
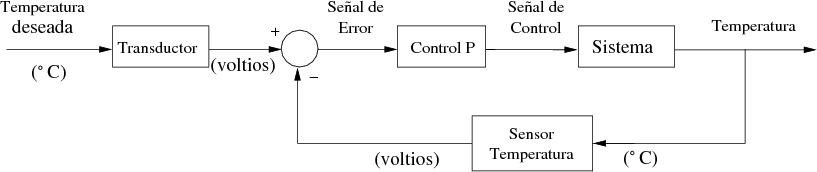
Si el calefactor
permite dar diferentes grados de calor, el esquema de control puede
mejorarse de forma que el controlador genera una señal de control que
permite regular la cantidad de calor que debe dar el calefactor
dependiendo de la señal de error que reciba. Un primer tipo de control
puede ser el denominado Proporcional (Figura 1.7
) en la que el
controlador simplemente genera una señal de control propocional a la de
error (u(t) = Ke(t)).
Los dispositivos a
utilizar pueden ser un amplificador que teniendo como entrada la
tensión resultante de la comparación, alimente un motor cuyo eje fija
la posición del reostato. De acuerdo con el signo y la magnitud de la
salida del operacional, el motor hará desplazar más o menos el reostato
hacia uno u otro lado dando así más o menos calor al tanque (Figura 1.3 ).
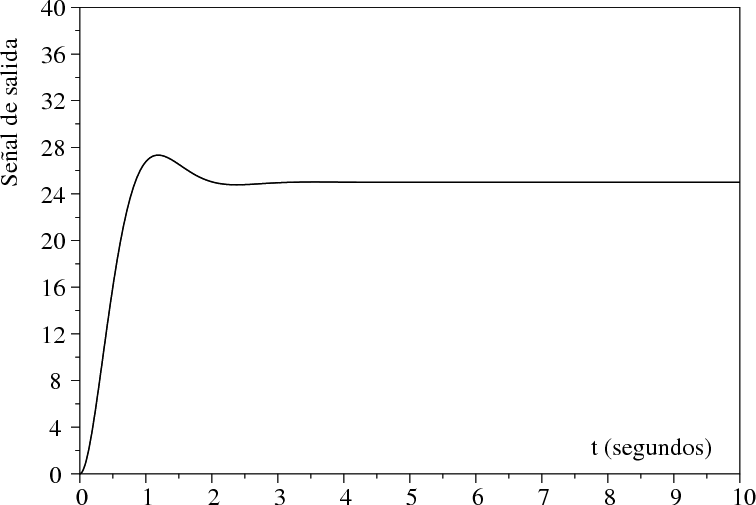
En la Figura 1.8 se
representa una posible respuesta temporal de un sistema de control
proporcional de temperatura.
De acuerdo con la
definición dada por el American Institute of Electrical Engineers
(AIEE) diremos que "un sistema de control realimentado o en lazo
cerrado es aquel que tiende a mantener una relación prevista e impuesta
por nosotros entre una variable del proceso (la salida) y una entrada
de referencia, comparando funciones de esta variables y usando su
diferencia como modelo de control".
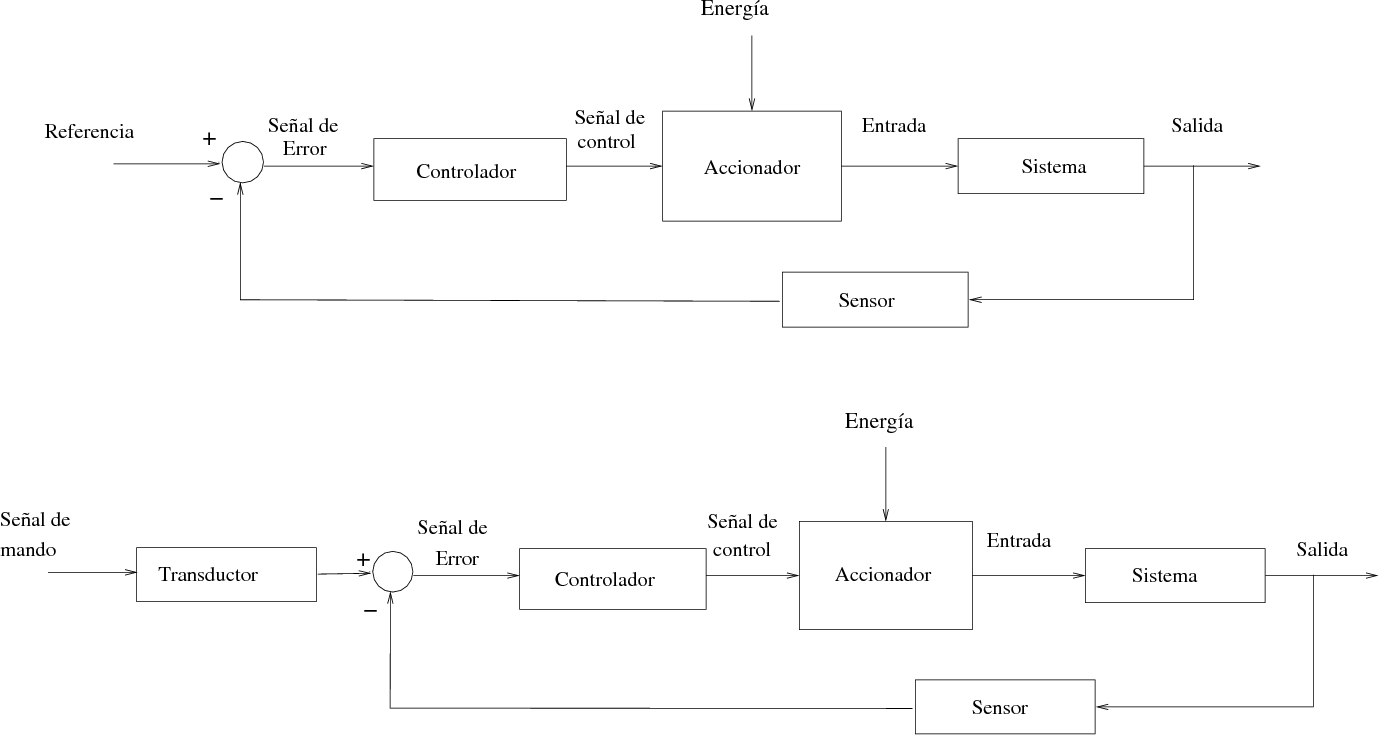
La representación
general para un sistema realimentado se muestra en la Figura 1.9 .a. En
la Figura 1.9
.b se representa otro
esquema de un sistema realimentado. En él se introduce un nuevo
elemento respecto a la representación anterior (Figura 1.9
.a): Se trata de un
prefiltro o transductor que permite acondicionar la señal de entrada
con la de salida. En aquellos casos (la mayoría) en los que la señal de
salida y la realimentada son de diferente naturaleza la introducción de
este dispositivo permite la conversión de la señal de referencia en una
señal de las mismas dimensiones que la señal que da el sensor. De ese
modo, ambas señales podrán ser comparadas para generar la señal de
error que será la entrada al elemento de control. En el ejemplo del
control de temperatura de los epígrafes anteriores, concretamente en la
Figura 1.7
referente al
control en lazo cerrado, ya aparece este elemento que en este caso
convertía la referencia introducida en ºC (valor
deseado para la temperatura del líquido) en voltios, susceptible de ser
comparada con la señal que se obtiene del sensor.
1.4. Visión histórica de la Teoría de
Control
Ir al Indice
Las secciones
precedentes nos han servido para distinguir entre sistemas de control
en lazo abierto y en lazo cerrado, introduciendo un concepto básico en
la Teoría de Control: la
Realimentación.
La realimentación no
es, en absoluto, un concepto exclusivo de la Ingenieria de Control. Por
ejemplo, en una organización social un líder es líder mientras realice
de forma satisfactoria los deseos de un grupo. Si falla, es elegido
otro líder. En este sistema la salida es el éxito del grupo realizando
sus deseos. El éxito actual se compara con el éxito deseado y si
coinciden o si el error es pequeño se mantienen las mismas acciones que
han llevado a este estado satisfactorio. En caso contrario, es decir,
si el error entre lo deseado y lo real es grande, habrá que tomar
medidas, como cambiar de líder, de política, etc., es decir, tomar las
medidas oportunas para acercarnos a la situación deseada.
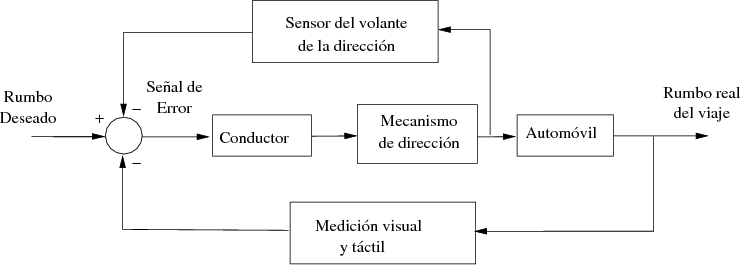
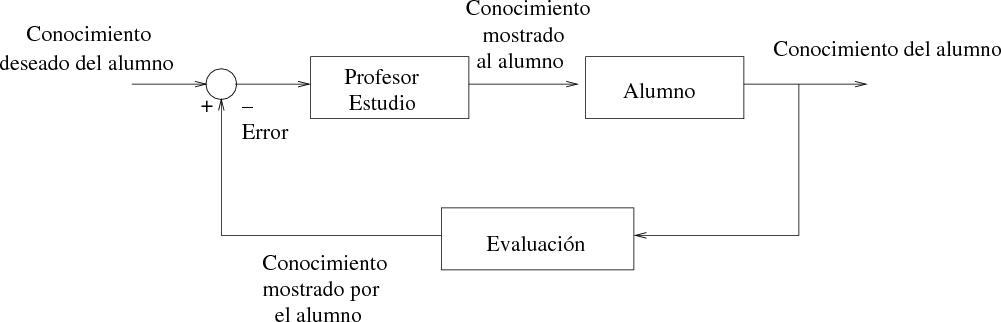
Asimismo, muchas de
nuestras acciones individuales conllevan el efecto de la
realimentación. Por ejemplo, el tomar un objeto con la mano, el
conducir un coche (Figura 1.10
) o la metodología de
estudio (Figura 1.11
) llevan implícito un
mecanismo de realimentación.
Debido a que la
utilización de la realimentación es evidente tanto en procesos humanos
como en la naturaleza, es muy difícil determinar cuándo fue utilizada
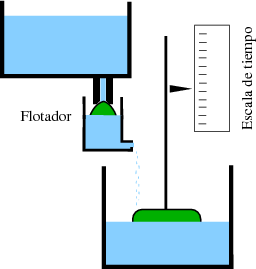
por primera vez de forma intencionada. Quizás las primeras evidencias
claras de la utilización consciente de la realimentación se remontan al
siglo I a. de J.C. y aparecen en la obra "Pneumática" de Herón de
Alejandría. En ella se muestran unos reguladores de flotación que
mantienen la altura de un líquido con un valor determinado mediante el
uso de una válvula que cierra el paso de líquido al tanque al alcanzar
una determinada altura en forma totalmente análoga a como actúan los
reguladores de nivel actuales en las cisternas domésticas. Asimismo, a
comienzos de la era cristiana, los árabes emplearon mecanismos de
realimentación para la construcción de relojes de agua (Figura 1.12 ).
Sobre el año 1600,
Francis Bacon describe un regulador de temperatura ideado por Cornelis
Drebbel para sus experimentos de alquimia. Este aparato consistía
básicamente en una caja con un fuego en el fondo y encima de éste un
compartimento interior que contenía aire o alcohol en un tubo con
mercurio. Cuando aumentaba la temperatura, aumentaba la presión dentro
del tubo y el mercurio se desplazaba moviendo a su vez una barrita la
cual disminuía la apertura de fuego.
En 1750, Meikle idea
un dispositivo para orientar de forma óptima las aspas de un molino de
viento.
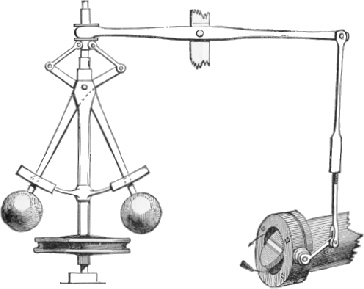
En 1788 aparece el
regulador centrífugo de Watt (Figura 1.13
). Éste constituye sin duda
alguna el ejemplo más clásico de sistema automático de control en lo
que podíamos llamar su prehistoria. Además fue de los primeros sistemas
de los que se hizo un estudio analítico profundo, que fue realizado por
Maxwell en su obra "En governors". Fue diseñado para regular la
velocidad de una máquina de vapor. En esencia no es más que un péndulo
centrífugo cuyo eje va unido al dispositivo cuya velocidad se desea
controlar. La velocidad de giro determina la posición de una leva que a
su vez fija la abertura de la válvula de admisión de vapor de la
máquina. De esta forma, se consigue mantener la velocidad a un valor
determinado incluso si existen perturbaciones introducidas por cambios
en el par solicitado a la máquina o en la presión de vapor suministrado
a la misma.
A todas estas
realizaciones que hemos mencionado les siguieron otras pero con un
denominador común: la realimentación. Todos ellos fueron realizados de una forma
simplista y en gran parte basándose en la experiencia y por
procedimientos de prueba y error.
La Automática dio un
paso decisivo con la adopción para el estudio de sus dispositivos de
la transformación de Laplace (1779), que permitió realizar un
tratamiento analítico sistemático de los dispositivos utilizados. Esta
transformación permitió convertir en simples expresiones algebraicas de
muy fácil manejo ecuaciones diferenciales lineales con coeficientes
constantes que se venían utilizado para modelizar comportamientos de
los procesos.
Por otra parte, el
desarrollo de la teoría de variable compleja realizado por Cauchy en la
misma época contribuyó en forma decisiva al desarrollo de la Automática
en el dominio de la transformación de Laplace. Además y como veremos a
lo largo del curso, los resultados que se obtengan en el dominio
transformado tienen una interpretación física clara y evidente,
dándonos información sobre el comportamiento del sistema en el dominio
sin transformar, es decir, en el dominio del tiempo.
Con todo, no podemos
hablar del establecimiento formal de la Teoría de Control propiamente
dicha hasta bien entrado el siglo XX. Desde la aplicación y desarrollo
de la transformada de Laplace hasta aproximadamente el comienzo de los
años 30 hubo importantes trabajos (como por ejemplo toda la teoría de
estabilidad de Lyapunov), pero éstos no fueron específicamente
realizados para su aplicación al control. La mayoría de ellos fueron
realizados por personas ligadas al campo de la Ingeniería Mecánica y
para ser aplicados en ese campo. Sólo cuando fue formalizada la Teoría
de Control, todos estos trabajos fueron absorbidos para formar parte de
su contenido.
Como primeros trabajos
específicos de la Teoría de Control pueden citarse el de Nyquist en
1932 "Regeneratio Theory" y el de Hazen 1934 "Theory of
servomechanisms". Es evidente que esta evolución de la Ingeniería no
fue casual. La revolución industrial daba lugar a máquinas cada vez más
complejas, a la vez que se tendía a realizar productos cada vez más
sofisticados. Todo ello exigía que el proceso de fabricación fuera más
preciso, rápido, fiel y también más rentable. Todo esto provocó que la
Automática tomase cuerpo como Teoría capaz de resolver de una forma
estructurada los problemas cada vez más complejos que iban
presentándose.
A partir de las fechas
antes citadas, empezaron a surgir numerosos trabajos e incluso los
primeros libros de texto sobre regulación automática. Como pasó con
muchas otras teorías la 2a Guerra Mundial supuso un serio avance del
Control debido principalmente a la necesidad de producción rápida y de
alta calidad.
Con todo, las
exigencias a la Automática fueron aumentando y alrededor del año 1960
nació lo que hoy se conoce como la "Moderna
Teoría de Control". Esta teoría
está basada en el estudio de las propias ecuaciones diferenciales del
sistema, actuando, por tanto, en el dominio temporal, y no en el
dominio transformado como ocurría hasta entonces. La idea clave es la
utilización de las llamadas variables de
estado juntamente con una notación matricial que simplifica
notablemente los cálculos a realizar. Tiene por tanto un alto contenido
matemático (especialmente matricial) pero permite resolver problemas
imposibles de resolver mediante la utilización de la transfornada de
Laplace. Hoy en día, los principales trabajos de investigación están
dentro de esta linea si bien es necesario señalar que la aplicación
real de los resultados que se están obteniendo está aún muy retrasada
respecto al desarrollo teórico. Sin embargo, es claro que el avance
tecnológico así como el aumento de la necesidad de producir productos
más complejos y más baratos llevan irremisiblemente a una aplicación de
la Moderna Teoría de Control en los procesos industriales.
No se puede terminar
esta relación histórica de la Automática sin dejar de hablar de la
influencia del desarrollo de la Informática y la introducción de los
ordenadores en el control de sistemas en lo que ha venido en llamarse
”Sistemas de Control Discretos o Digitales”. No es el objetivo de esta
sección el hacer una revisión histórica del control de procesos por
ordenador pero si es necesario presentarlo debido a la decisiva
importancia que tiene actualmente tanto en el campo de la investigación
como en el de las realizaciones prácticas. Es importante señalar que la
gran potencialidad de los ordenadores a la hora de tratar información
numérica (o en otros términos, digital) ha permitido que muchas de las
técnicas desarrolladas por la moderna Teoría de Control hayan podido
ser llevadas a la práctica.
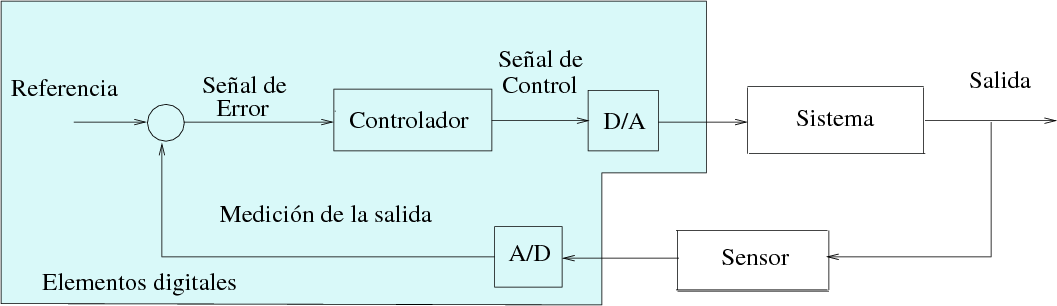
Es importante señalar
en este punto que la mayor parte de los sistemas físicos evolucionan de
forma continua con el tiempo y que un ordenador es incapaz de tratar
con este tipo de señales: solo puede operar con números. La Electrónica
se ha encargado de elaborar los dispositivos adecuados (convertidores
A/D y D/A) para convertir señales continuas en una sucesión de valores
numéricos y viceversa. De esta forma el esquema general de un control
por ordenador será el mostrado en la Figura 1.14
.
En un instante dado el
ordenador lee el valor de la salida que le suministra el convertidor
A/D. A partir de esa lectura y con lecturas anteriores, el programa de
control que lleve el ordenador genera una señal numérica que es
convertida en continua por el conversor D/A, generando así una señal de
control que entra al sistema. Este proceso se repite en forma
generalmente periódica, es decir, cada cierto "intervalo de muestreo".
Notar que en este
esquema sólo se lee o se da información del sistema en los "instantes
de muestreo" de forma que no sabemos qué ocurre entre dos instantes
consecutivos de muestreo. Sin entrar en más detalles sólo señalar que
esta forma de operación es la que ha dado origen a la Teoría de Control
Digital. Si bien al principio se trató de llevar al campo digital toda
la Teoría desarrollada para el continuo, pronto se vieron las inmensas
posibilidades que proporcionaba el control digital siendo hoy en día un
capítulo de la Automática con más que suficiente entidad.
De entre todo lo
expuesto, cabe destacar que la presente asignatura va a estudiar la
Teoría Clásica de Control tanto en el dominio temporal como en el
transformado mediante la utilización de la transformada de Laplace.
1.5. Clasificación de los
sistemas
Ir al Indice
Como veremos más
adelante, una de las tareas más importantes a realizar cuando se desea
controlar un sistema es la de buscar un modelo matemático de dicho
sistema (en general, una ecuación diferencial) que nos permita
posteriormente analizar su comportamiento y partiendo de este análisis
diseñar el controlador. Por lo tanto, una vez que se ha realizado la
modelización del proceso no se manejará al mismo como un ente físico
sino como un ente puramente matemático.
Pues bien, una primera
clasificación de los sistemas es en base al tipo de modelo al cual
responden:
- Sistemas lineales: Son
aquellos que están definidos por ecuaciones diferenciales lineales.
Dentro de éstos puede distinguirse aquellos cuyos coeficientes son
constantes y aquellos en los que dichos coeficientes son variables con
el tiempo.
- Sistemas no lineales: Son aquellos que están
definidos por ecuaciones diferenciales no lineales.
Dependiendo del tipo de señales que se manejan
pueden realizarse dos clasificaciones diferentes:
- Sistemas continuos y discretos: Dependiendo si el
tipo de señales varían en forma continua o están discretizadas.
- Sistemas con señales
deterministas o aleatorias: El tipo de señales que pueden actuar sobre
un sistema pueden estar totalmente definidas y pueden representarse
mediante una fórmula analítica (por ejemplo sen(t), ...). Este tipo de
señales son, por tanto, deterministas. Sin embargo, pueden existir
señales actuando sobre el sistema que no posean esta característica, y
que sea necesario tratarlas de forma estadística como señales de tipo
aleatorio (sistemas estocásticos). Este tipo de señales representan, en
general, perturbaciones actuantes sobre nuestro sistema.
En cuanto a la estructura general del sistema puede
hacerse una última clasificación en:
- Sistemas monovariables
(SISO: Single Input Single Output): Son sistemas con una sola entrada y
una sola salida.
- Sistemas multivariables (MIMO): Sistemas con varias
entradas y varias salidas.
Las posibles combinaciones entre estas
clasificaciones sirven para definir de alguna forma a un sistema. En
particular, esta asignatura va a centrarse en el estudio de sistemas
lineales, continuos, deterministas y generalmente monovariables.
1.6. Fundamentos de la Teoría de
Sistemas
Ir al Indice
1.6.1. Sistema físico. Modelo. Representación del
modelo
El vocablo sistema es
uno de los más extensamente utilizados en la Ciencia apareciendo en
casi todos sus campos fundamentales: Física, Química, Economía,
Sociología, etc ... Estamos pues ante un concepto muy general y en
cierta forma muy impreciso. De momento nos limitaremos a establecer que
para nosotros genéricamente un sistema es un objeto, dispositivo o ente
donde se manifiesta una relación de tipo causa-efecto.
Debido a la
imposibilidad de tener un conocimiento total a priori del
comportamiento de un sistema físico, es necesario recurrir a
simplificaciones matemáticas del mismo y poder así realizar un análisis
del sistema y diseñar el control conveniente. Esta simplificación
matemática se denomina modelo del sistema.
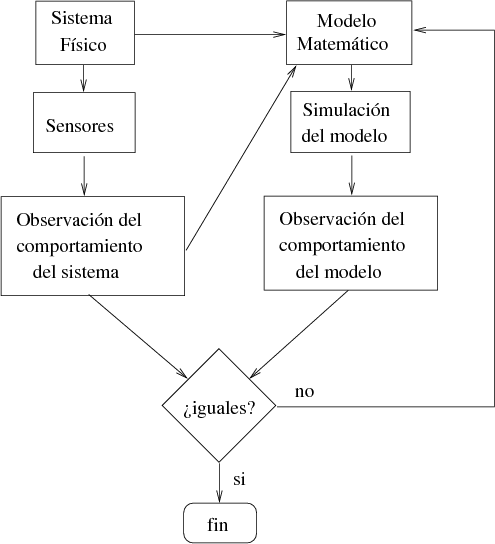
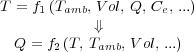
Es claro que esta
representación no es única. Un sistema podrá ser representado por una
ecuación diferencial de orden n, o por
n ecuaciones de orden 1, o aplicando la transformada de Laplace, por
una relación algebraica. Todas ellas son distintas representaciones
para un mismo modelo. En la Figura 1.15
se puede observar el
algoritmo de validación del modelo de un sistema físico real.
Es evidente que
estamos ante un problema crítico de la Teoría de Sistemas: un mal
modelado llevará a que todas las conclusiones que de él obtengamos sean
erróneas. Es evidente que si diseñamos un controlador a partir de un
modelo erróneo, cuando conectemos ese controlador al proceso real no se
comportará como habíamos previsto.
Los dos atributos fundamentales que deben exigirse
a un modelo serán entonces:
- Que refleje el
compartamiento del aspecto del sistema en que se está interesado (no
tiene porqué reflejar todas los aspectos).
- Que sea útil, esto es, susceptible de ser manejado
con cierta facilidad.
En la realidad casi
nunca se podrá obtener un modelo que corresponda exactamente con el
sistema real, aunque en la mayoría de los casos bastará que sus
comportamientos sean parecidos en el rango de actuación en el que vaya
a trabajar el sistema.
1.6.2. Sistema Dinámico
Lineal
Ir al Indice
La Teoría de Control,
como parte de la Teoría de Sistemas, estudia a los sistemas dinámicos.
En todo sistema es posible advertir un conjunto de estimulos (entradas)
que actúan sobre él, un conjunto de respuestas (salidas) motivadas por
aquéllos y unas observaciones de estas respuestas detectadas bien
directamente por nuestros sentidos o por algún sensor artificial. Las
entradas pueden ser señales de control elegidas a voluntad y/o señales
aleatorias de comportamiento impredecible (perturbaciones). Así mismo
pueden existir perturbaciones que actúan sobre la señal contaminando de
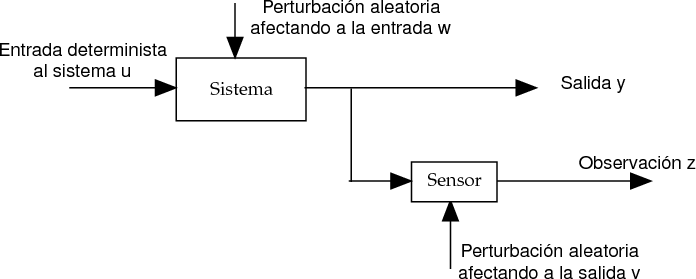
esta forma la observación. Con todo esto se puede representar un
sistema dinámico por el esquema mostrado en la Figura 1.16
. Es evidente que si
no existen perturbaciones en la observación entonces ésta coincide con
la salida.
Por lo tanto, el
modelo de un sistema dinámico debe especificar todas las relaciones
existentes entre las señales que intervienen en el proceso considerado.
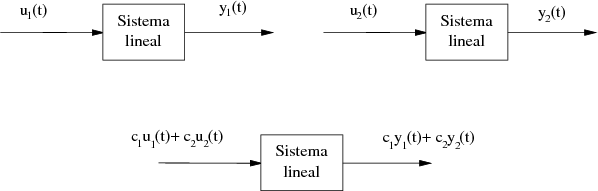
Dado que a lo largo esta asignatura se van a estudiar los sistemas
lineales será necesario encontrar una definición de los mismos. Un
sistema dinámico es lineal si la salida del mismo cumple el principio
de superposición, como se puede ver gráficamente en la Figura 1.17 .