Se presentan unas modificaciones al PID clásico con sus tres acciones de control en la cadena directa aplicadas a la señal de error. Se aplican a la señal de salida la acción derivativa y la proporcional.
Indice del Apéndice
A 2.1 Introducción
A 2.2 Control Derivativo causal
A 2.3 Control PI-D
A 2.4 Control I-PD
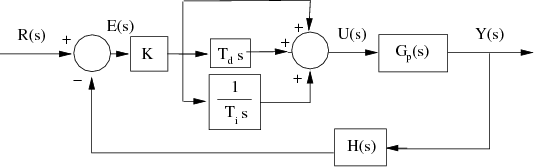
A lo largo de toda la asignatura, y sobre todo del capítulo 10, se ha estudiado el control PID colocado en la cadena directa, esto es, se han aplicado las tres acciones básicas de control (proporcional, derivativa e integral) a la señal de error. Por lo tanto, en el caso del PID, la señal de control aplicada al sistema y la función de transferencia, respectivamente, del PID serían:
donde K es la ganancia de la acción proporcional, y Td = Kd∕K y Ti = K∕Ki las constantes de tiempo de la acción derivativa e integral, respectivamente. En la Figura A 2.1 se muestra el diagrama de bloques de un sistema en lazo cerrado con control PID.
|
|
Sin embargo, este controlador PID es ideal y da lugar a ciertos problemas de estabilidad, sensibilidad, excesivo ancho de banda en algunos casos, etc., y por ello será necesario en muchos casos modificarlo, suavizando sus efectos.
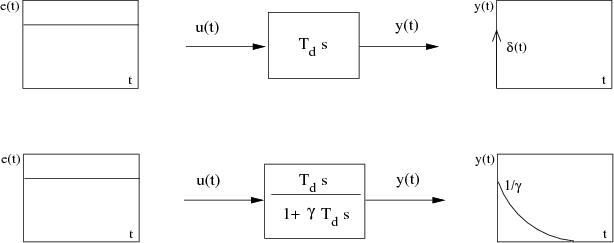
Debido a que el control derivativo provoca una función impulso ante un cambio brusco en la entrada al controlador (por ejemplo una señal escalón), se hace conveniente modificarlo por un control cuya función de transferencia sea:

De tal forma que ante un cambio brusco en la entrada se puede suavizar la señal de salida del controlador sin más que elegir un valor adecuado del parámetro γ (Figura A 2.2 ). Aún así, la presencia del control proporcional en la cadena directa sigue trasladando a la salida del controlador los cambios bruscos que se produzcan en la entrada al mismo.
|
|
Para evitar este problema, que es un problema en el sentido de que si se somete a un sistema a cambios bruscos en los valores de sus variables se pueda producir daños en sus componentes, se puede modificar el esquema de control del PID de varias formas, como se verá a continuación.
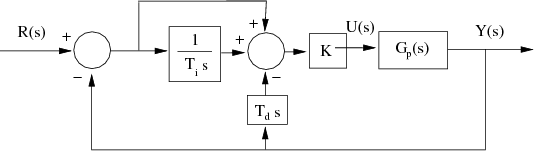
Como primera solución se puede desplazar el control derivativo de la cadena directa (Figura A 2.1 ) a la cadena de la realimentación de la forma que se ve en la Figura A 2.3 .
|
|
De esta forma ya no se deriva la señal de referencia sino la salida, que en principio no sufre cambios excesivamente bruscos. La señal de control con esta nueva configuración, en la que el control derivativo no se aplica a la señal de referencia, es:

La función de transferencia en lazo cerrado del sistema con el control PID colocado en la cadena directa es:

Y, por el contrario, con el control derivativo desplazado a la cadena de la realimentación será:

Se puede observar que son muy parecidas, con la única diferencia que el control PID tiene un cero más que el PI-D, esto es, para los mismos valores de los parámetros, el control PID es más rápido en respuesta y presenta más rebose que el control modificado.
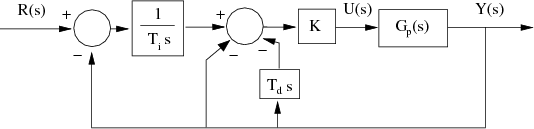
Aún así con el control PI-D se siguen produciendo saltos bruscos en la señal de control si se producen en la entrada, y por lo tanto puede ser ventajoso mover también el control proporcional a la realimentación (Figura A 2.4 ).
|
|
De esta forma la señal de referencia (cambios bruscos) ni se deriva ni se multiplica por un valor constante. La señal de control es entonces:

Con esta modificación se tiene que la referencia únicamente es afectada por la parte integral. La función de transferencia en lazo cerrado del sistema con el control I-PD será:

Habiéndose reducido de nuevo el número de ceros, con el consiguiente efecto que ello conlleva.