|
|
Se presentan unas posibles soluciones de implementación de controladores tipo PID analógicos utilizando amplificadores operacionales.
En el procesamiento de señal y en circuitos para control de sistemas la finalidad más común de los circuitos electrónicos es la amplificación de señal, y para ello se utiliza de forma generalizada el amplificador operacional (OPAM).
Aunque no es labor de esta asignatura el profundizar en el estudio de estos dispositivos, dada la utilización de los mismos en la Ingeniería de Control se va a proceder a realizar una breve introducción.
Aún cuando el OPAM esté formado internamente por transistores y resistencias conectados entre sí de manera compleja, sus características externas, que son los que realmente interesan en la Ingeniería de Control, son relativamente simples. De hecho, el OPAM se puede estudiar únicamente desde un punto de vista externo, considerándolo como una “caja negra”, y siendo representados por modelos lineales muy simplificados.
|
|
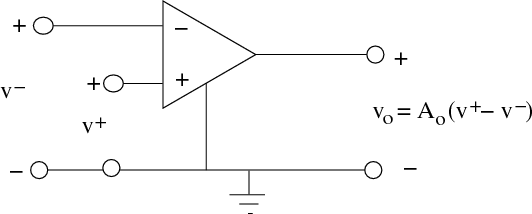
El símbolo del OPAM se muestra en la Figura A1.1. La ganancia a baja frecuencia A0 de los amplificadores comerciales van desde 105 hasta 107, considerándose a efectos prácticos como infinito, sin con ello perder exactitud en los cálculos. Ésta sería una de las aproximaciones que se realizan al modelizar lo que se denomina el OPAM ideal, y que se detallan a continuación:
La aplicación de estas aproximaciones hace posible la construcción de múltiples configuraciones donde esté presente el OPAM. Ahora bien, hay que adelantar que no es posible utilizar un OPAM tal como se muestra en la Figura A1.1, sino que es necesario añadir realimentación de la señal de salida del mismo (vo) hacia la terminal de entrada (v-).
A lo largo de este apéndice se verá que en la construcción de reguladores de sistemas de control se utilizan de forma habitual circuitos que multipliquen, deriven o integren una señal. Dichos circuitos se pueden construir de una forma muy sencilla mediante OPAM como se estudiará a continuación.
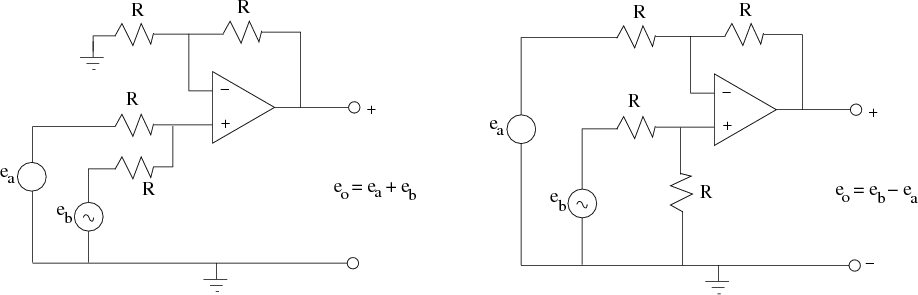
Como se ve a lo largo de la asignatura, uno de los elementos fundamentales en un diagrama de control es la suma o resta de señales (hay que recordar que el concepto de realimentación surge al querer comparar o restar la salida real de un sistema con la salida deseada para el mismo o referencia). Cuando estas señales son voltajes la utilización de OPAM simplifica mucho la construcción de los circuitos que realicen dichas funciones.
|
|
En la Figura A1.2 se muestran algunas posibles configuraciones que permiten realizar sumas y restas.
En la Ingeniería de Control es constante la necesidad de introducir en el esquema de control circuitos que amplifiquen, deriven e integren señales, o una combinación de ellos, y todas estas operaciones, además de las sumas y restas vistas en el apartado anterior, se pueden implementar de una forma sencilla con los OPAM.
|
|
|
|
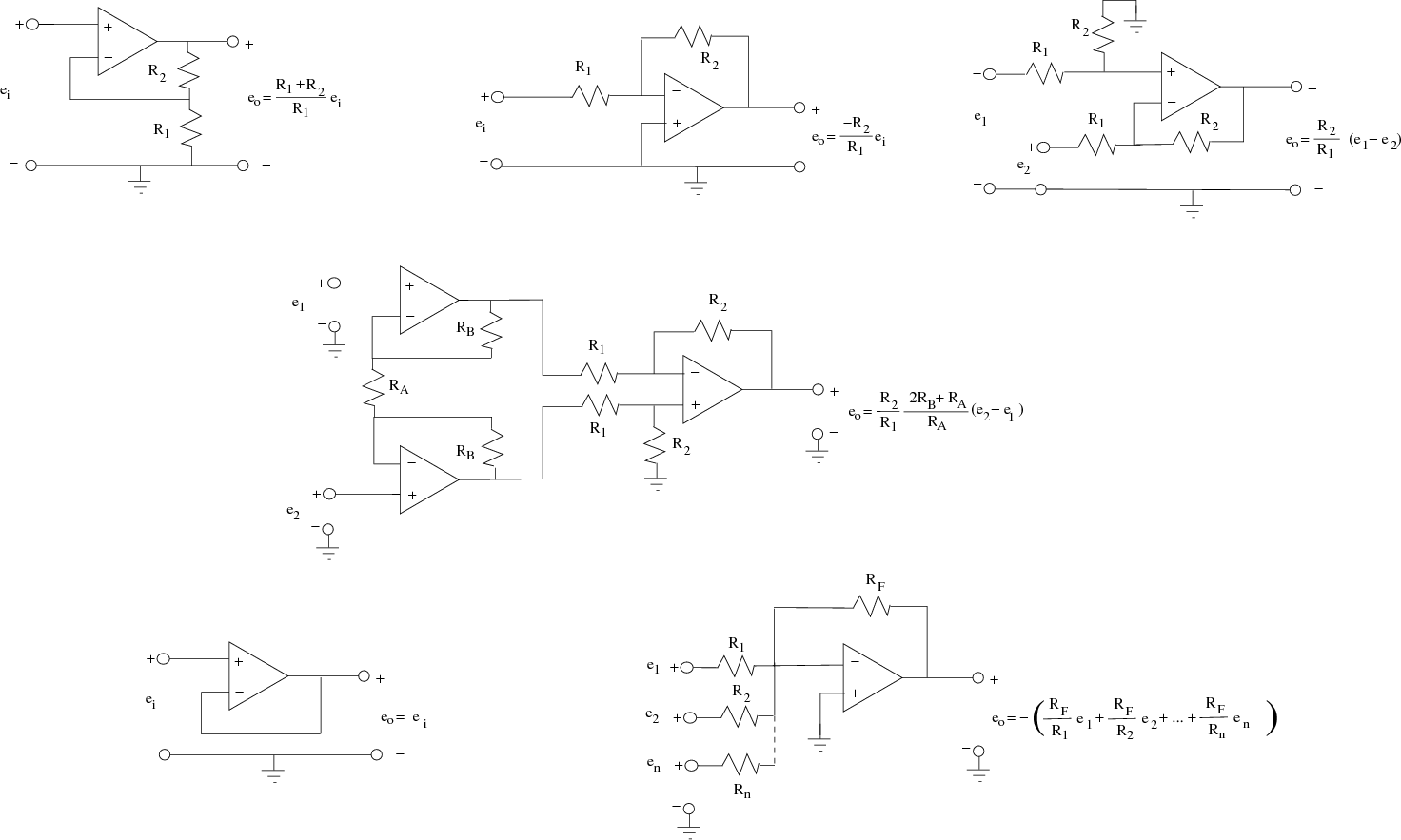
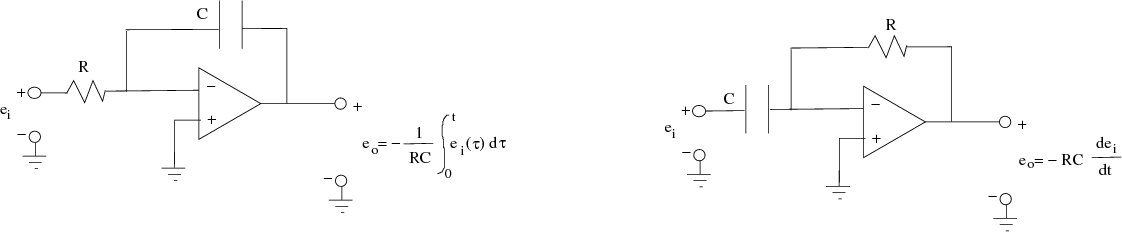
En las Figuras A1.3 y A1.4 se pueden ver una serie de configuraciones con el OPAM que permiten implementar circuitos amplificadores e integradores y derivadores, respectivamente.
Como se ha explicado en el tema 7, en cualquier sistema de control existe una señal de control que el controlador tendrá que generar a partir de la señal de error. Y en la mayoría de los casos bastará con la utilización de un control tipo PID. Si el lazo de control se implementa de forma analógica es necesario implementar dichas acciones con la ayuda de circuitos electrónicos con OPAMs.
A decir verdad hoy en día no es tan habitual este hecho, pues en muchos casos la implementación del control se realiza en un dispositivo digital y no será necesario construir físicamente los circuitos analógicos que se van a explicar a continuación. Pero como en algunos casos el control podrá ser analógico se presenta este apéndice.
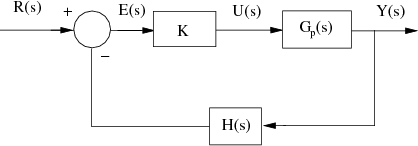
Se trata de la acción de control más sencilla de todas (Figura A1.5 ), en el que la señal de control generada por el controlador es simplemente proporcional a la señal de error según la ecuación:

|
|
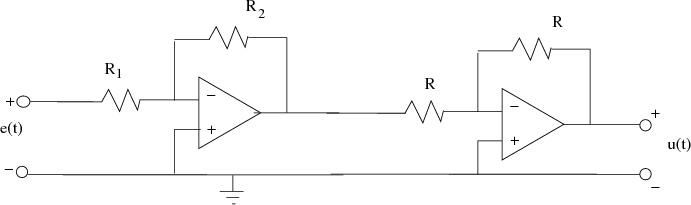
siendo K la ganancia proporcional del controlador P. Un circuito electrónico sencillo que permite implementar el subsistema controlador es el reflejado en la Figura A1.6, donde la constante proporcional es:

|
|
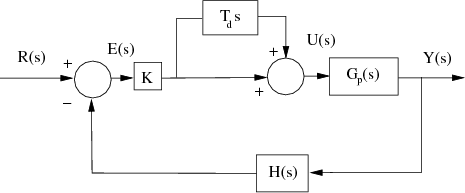
Como ya se estudia en el tema 7, se puede mejorar el comportamiento del sistema realimentado si a la acción de control del regulador proporcional se le añade una acción que derive la señal de error (Figura A1.7 ). Así se obtiene el controlador proporcional-derivativo (PD). La ecuación que rige su funcionamiento es:

|
|
donde K es la ganancia de la acción proporcional, y Td = Kd∕K la constante de tiempo de la acción derivativa, o constante derivativa.
|
|
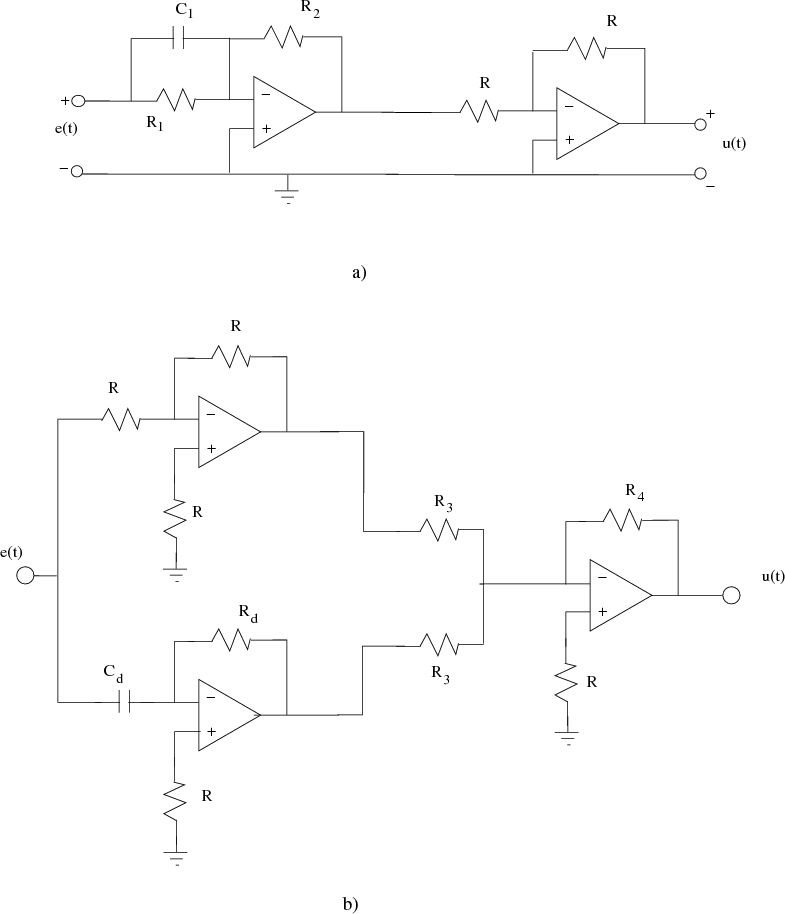
En la Figura A1.8 se muestran dos circuitos que reproducen un controlador PD. En el primero de ellos las constantes del controlador son:

y en el segundo:

La ventaja del primer circuito es que se necesita un OPAM menos para su construcción, y la del segundo es que permite una selección independiente de las constantes proporcional y derivativa. Así, en el primer circuito una constante derivativa grande supone la utilización de un condensador C1 de valor grande. Sin embargo, en el segundo se puede conseguir el mismo efecto con una adecuada selección tanto del condensador Cd como de la resistencia Rd, pudiendo escoger valores más realistas de los dos.
Del listado de características del control PD que se ve el capítulo 7 hay que recordar que:
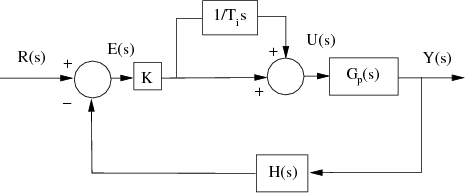
Si a la acción de control del regulador proporcional se le añade una acción que integre la señal de error se obtiene el controlador Proporcional-Integral (PI) (Figura A1.9). De esta forma se consigue evitar el problema que aparecía con el control PD dado que al integrar la señal de error, si ésta es constante la acción correctora aumenta hasta corregir el error. Así, se consigue aunar la regulación lo suficientemente rápida que proporciona el control Proporcional, con la precisión en el estacionario del control Integral.
|
|
La ecuación dinámica y la función de transferencia del controlador PI es

donde K es la ganancia de la acción proporcional, y Ti = K∕Ki la constante de tiempo de la acción integral o constante integral.
|
|
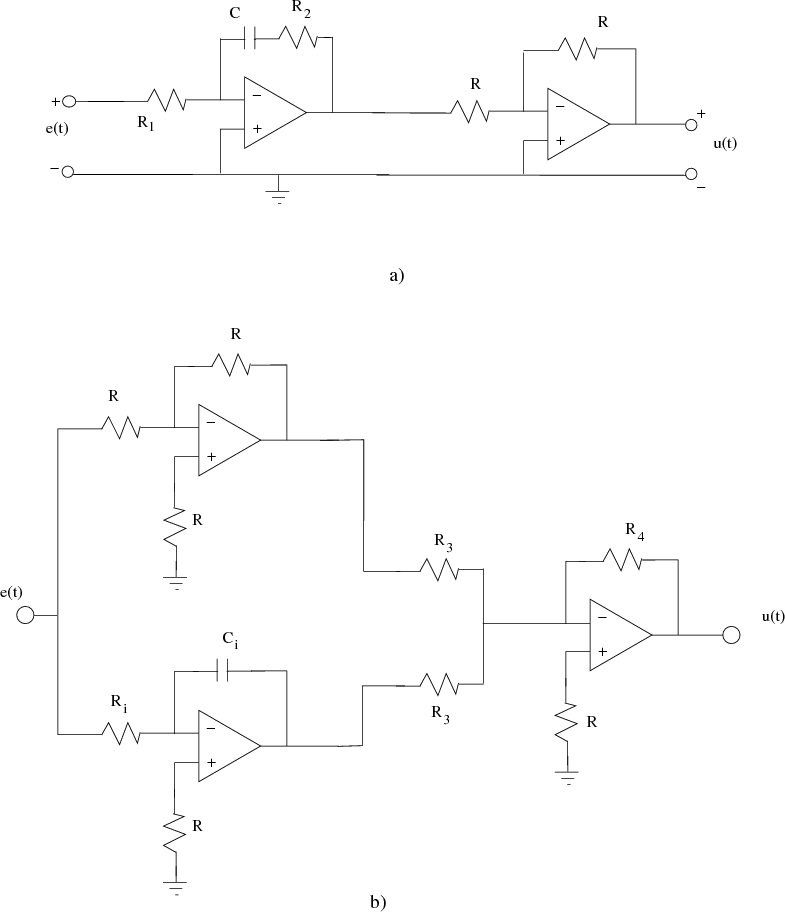
Si se utiliza el primero de los circuitos de la Figura A1.10 como controlador PI, las constantes del controlador serían:

y si se escoge el segundo:

Las ventajas de uno u otro son las mismas que las de los controladores PD implementados en la Figura A1.8.
Como en el caso del control PD implementado de forma analógica es necesario recordar que:
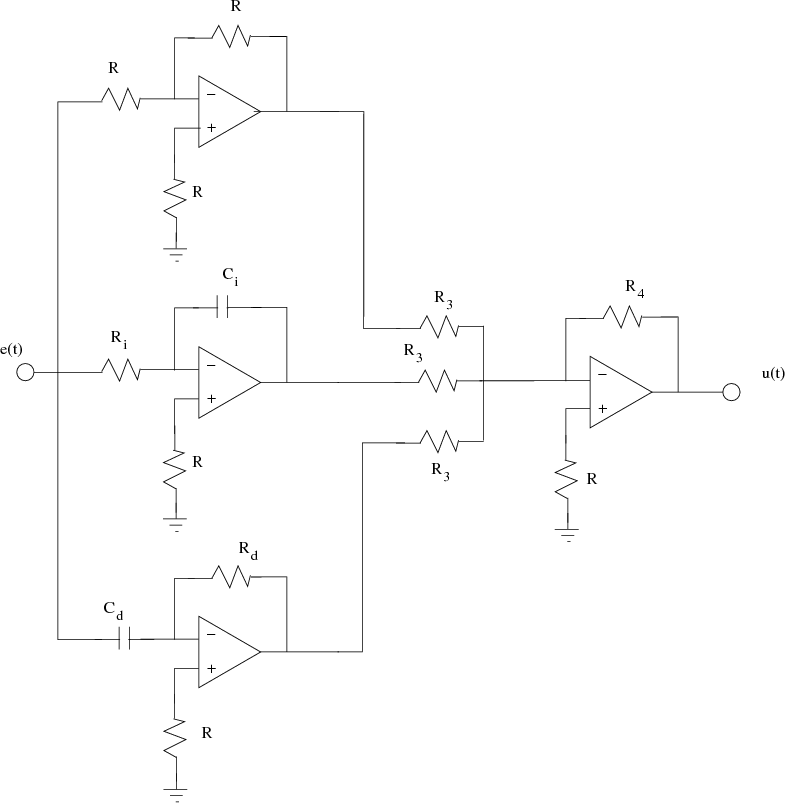
Si se reúnen las tres acciones básicas de control, esto es, se genera la señal de control a partir de una combinación lineal de la señal de error, su derivada y su integral, se obtiene el controlador más general, el proporcional-integral-derivativo (PID), que consigue la rapidez de respuesta de su parte proporcional, la reducción del rebose de la parte derivativa, y la anulación del error estacionario de la parte integral. La ecuación diferencial y la función de transferencia del controlador PID sería:

donde K es la ganancia proporcional, y Td = Kd∕K y Ti = K∕Ki las constantes de tiempo de la acción derivativa e integral, respectivamente.
|
|
En el circuito electrónico de la Figura A1.11 se muestra la implementación de un controlador PID donde las constantes del mismo son: